 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvFormer: Parameter Reduction in Transformer Models for 3D Human Pose Estimation by Leveraging Dynamic Multi-Headed Convolutional Attention
Apr 04, 2023



Recently, fully-transformer architectures have replaced the defacto convolutional architecture for the 3D human pose estimation task. In this paper we propose \textbf{\textit{ConvFormer}}, a novel convolutional transformer that leverages a new \textbf{\textit{dynamic multi-headed convolutional self-attention}} mechanism for monocular 3D human pose estimation. We designed a spatial and temporal convolutional transformer to comprehensively model human joint relations within individual frames and globally across the motion sequence. Moreover, we introduce a novel notion of \textbf{\textit{temporal joints profile}} for our temporal ConvFormer that fuses complete temporal information immediately for a local neighborhood of joint features. We have quantitatively and qualitatively validated our method on three common benchmark datasets: Human3.6M, MPI-INF-3DHP, and HumanEva. Extensive experiments have been conducted to identify the optimal hyper-parameter set. These experiments demonstrated that we achieved a \textbf{significant parameter reduction relative to prior transformer models} while attaining State-of-the-Art (SOTA) or near SOTA on all three datasets. Additionally, we achieved SOTA for Protocol III on H36M for both GT and CPN detection inputs. Finally, we obtained SOTA on all three metrics for the MPI-INF-3DHP dataset and for all three subjects on HumanEva under Protocol II.
On the role of depth predictions for 3D human pose estimation
Mar 03, 2021

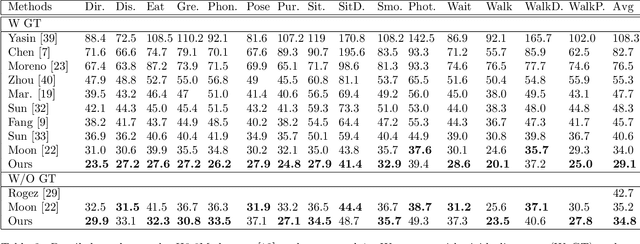
Following the successful application of deep convolutional neural networks to 2d human pose estimation, the next logical problem to solve is 3d human pose estimation from monocular images. While previous solutions have shown some success, they do not fully utilize the depth information from the 2d inputs. With the goal of addressing this depth ambiguity, we build a system that takes 2d joint locations as input along with their estimated depth value and predicts their 3d positions in camera coordinates. Given the inherent noise and inaccuracy from estimating depth maps from monocular images, we perform an extensive statistical analysis showing that given this noise there is still a statistically significant correlation between the predicted depth values and the third coordinate of camera coordinates. We further explain how the state-of-the-art results we achieve on the H3.6M validation set are due to the additional input of depth. Notably, our results are produced on neural network that accepts a low dimensional input and be integrated into a real-time system. Furthermore, our system can be combined with an off-the-shelf 2d pose detector and a depth map predictor to perform 3d pose estimation in the wild.