 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing scientific machine learning for experimental bifurcation analysis of dynamic systems
Oct 22, 2021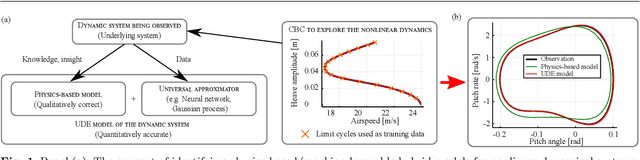
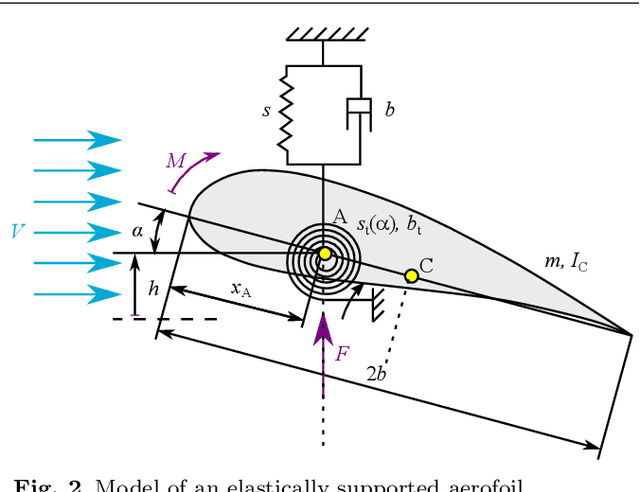
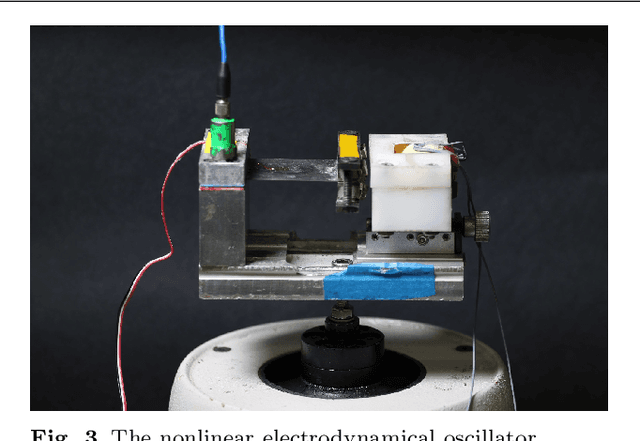
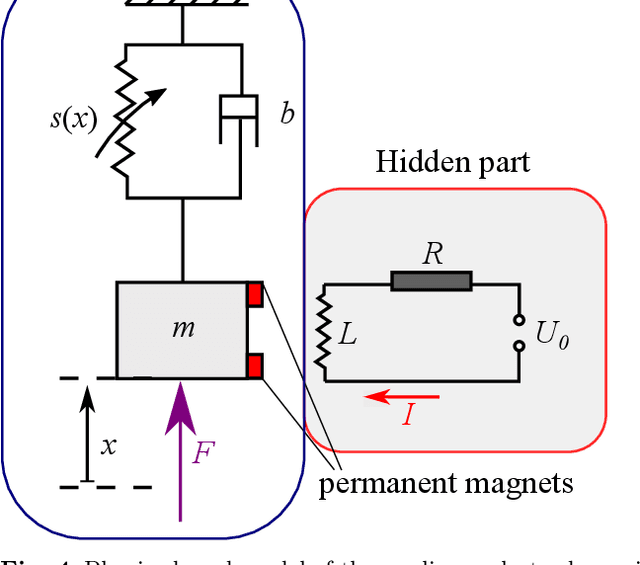
Augmenting mechanistic ordinary differential equation (ODE) models with machine-learnable structures is an novel approach to create highly accurate, low-dimensional models of engineering systems incorporating both expert knowledge and reality through measurement data. Our exploratory study focuses on training universal differential equation (UDE) models for physical nonlinear dynamical systems with limit cycles: an aerofoil undergoing flutter oscillations and an electrodynamic nonlinear oscillator. We consider examples where training data is generated by numerical simulations, whereas we also employ the proposed modelling concept to physical experiments allowing us to investigate problems with a wide range of complexity. To collect the training data, the method of control-based continuation is used as it captures not just the stable but also the unstable limit cycles of the observed system. This feature makes it possible to extract more information about the observed system than the standard, open-loop approach would allow. We use both neural networks and Gaussian processes as universal approximators alongside the mechanistic models to give a critical assessment of the accuracy and robustness of the UDE modelling approach. We also highlight the potential issues one may run into during the training procedure indicating the limits of the current modelling framework.