 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFTA generation using GenAI with an Autonomy sensor Usecase
Nov 22, 2024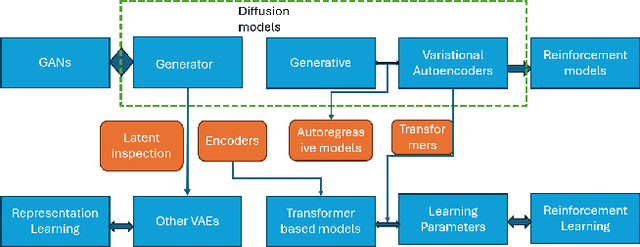



Functional safety forms an important aspect in the design of systems. Its emphasis on the automotive industry has evolved significantly over the years. Till date many methods have been developed to get appropriate FTA(Fault Tree analysis) for various scenarios and features pertaining to Autonomous Driving. This paper is an attempt to explore the scope of using Generative Artificial Intelligence(GenAI) in order to develop Fault Tree Analysis(FTA) with the use case of malfunction for the Lidar sensor in mind. We explore various available open source Large Language Models(LLM) models and then dive deep into one of them to study its responses and provide our analysis. This paper successfully shows the possibility to train existing Large Language models through Prompt Engineering for fault tree analysis for any Autonomy usecase aided with PlantUML tool.
Autonomous Vehicles: Evolution of Artificial Intelligence and Learning Algorithms
Feb 28, 2024The advent of autonomous vehicles has heralded a transformative era in transportation, reshaping the landscape of mobility through cutting-edge technologies. Central to this evolution is the integration of Artificial Intelligence (AI) and learning algorithms, propelling vehicles into realms of unprecedented autonomy. This paper provides a comprehensive exploration of the evolutionary trajectory of AI within autonomous vehicles, tracing the journey from foundational principles to the most recent advancements. Commencing with a current landscape overview, the paper delves into the fundamental role of AI in shaping the autonomous decision-making capabilities of vehicles. It elucidates the steps involved in the AI-powered development life cycle in vehicles, addressing ethical considerations and bias in AI-driven software development for autonomous vehicles. The study presents statistical insights into the usage and types of AI/learning algorithms over the years, showcasing the evolving research landscape within the automotive industry. Furthermore, the paper highlights the pivotal role of parameters in refining algorithms for both trucks and cars, facilitating vehicles to adapt, learn, and improve performance over time. It concludes by outlining different levels of autonomy, elucidating the nuanced usage of AI and learning algorithms, and automating key tasks at each level. Additionally, the document discusses the variation in software package sizes across different autonomy levels