 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Filter Medium Performances in Chamber Filter Presses with Digital Twins Using Neural Network Technologies
Feb 20, 2025Efficient solid-liquid separation is crucial in industries like mining, but traditional chamber filter presses depend heavily on manual monitoring, leading to inefficiencies, downtime, and resource wastage. This paper introduces a machine learning-powered digital twin framework to improve operational flexibility and predictive control. A key challenge addressed is the degradation of the filter medium due to repeated cycles and clogging, which reduces filtration efficiency. To solve this, a neural network-based predictive model was developed to forecast operational parameters, such as pressure and flow rates, under various conditions. This predictive capability allows for optimized filtration cycles, reduced downtime, and improved process efficiency. Additionally, the model predicts the filter mediums lifespan, aiding in maintenance planning and resource sustainability. The digital twin framework enables seamless data exchange between filter press sensors and the predictive model, ensuring continuous updates to the training data and enhancing accuracy over time. Two neural network architectures, feedforward and recurrent, were evaluated. The recurrent neural network outperformed the feedforward model, demonstrating superior generalization. It achieved a relative $L^2$-norm error of $5\%$ for pressure and $9.3\%$ for flow rate prediction on partially known data. For completely unknown data, the relative errors were $18.4\%$ and $15.4\%$, respectively. Qualitative analysis showed strong alignment between predicted and measured data, with deviations within a confidence band of $8.2\%$ for pressure and $4.8\%$ for flow rate predictions. This work contributes an accurate predictive model, a new approach to predicting filter medium cycle impacts, and a real-time interface for model updates, ensuring adaptability to changing operational conditions.
PDC: Piecewise Depth Completion utilizing Superpixels
Jul 14, 2021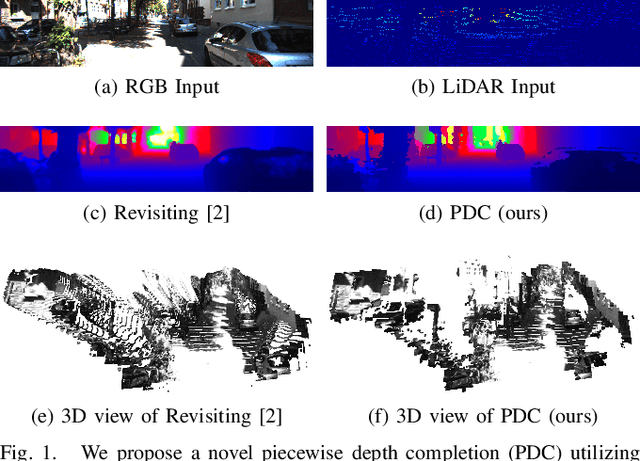

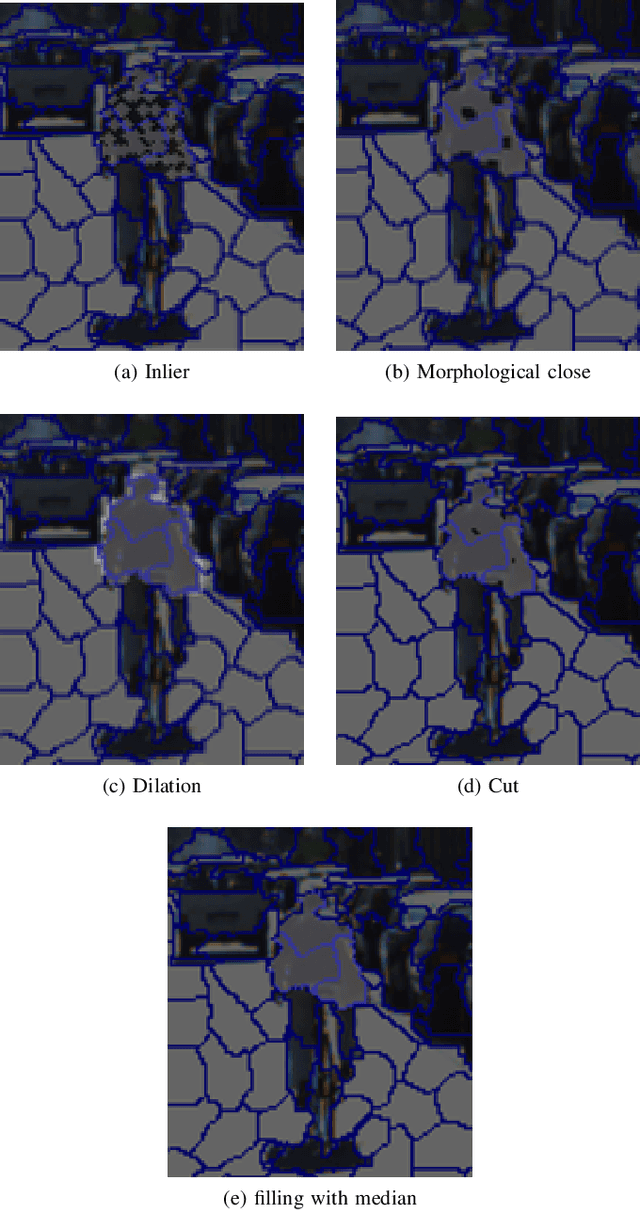

Depth completion from sparse LiDAR and high-resolution RGB data is one of the foundations for autonomous driving techniques. Current approaches often rely on CNN-based methods with several known drawbacks: flying pixel at depth discontinuities, overfitting to both a given data set as well as error metric, and many more. Thus, we propose our novel Piecewise Depth Completion (PDC), which works completely without deep learning. PDC segments the RGB image into superpixels corresponding the regions with similar depth value. Superpixels corresponding to same objects are gathered using a cost map. At the end, we receive detailed depth images with state of the art accuracy. In our evaluation, we can show both the influence of the individual proposed processing steps and the overall performance of our method on the challenging KITTI dataset.