 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent velocity agreement in robot networks
May 20, 2011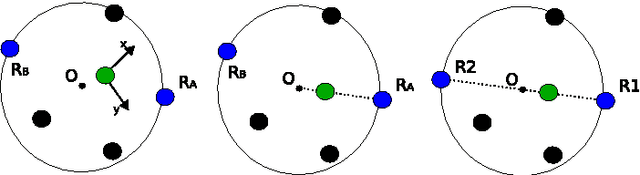


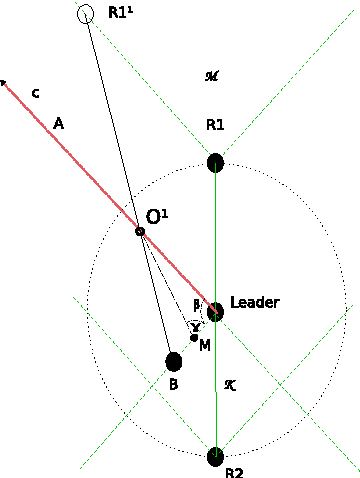
In this paper we propose and prove correct a new self-stabilizing velocity agreement (flocking) algorithm for oblivious and asynchronous robot networks. Our algorithm allows a flock of uniform robots to follow a flock head emergent during the computation whatever its direction in plane. Robots are asynchronous, oblivious and do not share a common coordinate system. Our solution includes three modules architectured as follows: creation of a common coordinate system that also allows the emergence of a flock-head, setting up the flock pattern and moving the flock. The novelty of our approach steams in identifying the necessary conditions on the flock pattern placement and the velocity of the flock-head (rotation, translation or speed) that allow the flock to both follow the exact same head and to preserve the flock pattern. Additionally, our system is self-healing and self-stabilizing. In the event of the head leave (the leading robot disappears or is damaged and cannot be recognized by the other robots) the flock agrees on another head and follows the trajectory of the new head. Also, robots are oblivious (they do not recall the result of their previous computations) and we make no assumption on their initial position. The step complexity of our solution is O(n).