 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing the hierarchy of keywords in on-line news portals
Jun 20, 2016The tagging of on-line content with informative keywords is a widespread phenomenon from scientific article repositories through blogs to on-line news portals. In most of the cases, the tags on a given item are free words chosen by the authors independently. Therefore, relations among keywords in a collection of news items is unknown. However, in most cases the topics and concepts described by these keywords are forming a latent hierarchy, with the more general topics and categories at the top, and more specialised ones at the bottom. Here we apply a recent, cooccurrence-based tag hierarchy extraction method to sets of keywords obtained from four different on-line news portals. The resulting hierarchies show substantial differences not just in the topics rendered as important (being at the top of the hierarchy) or of less interest (categorised low in the hierarchy), but also in the underlying network structure. This reveals discrepancies between the plausible keyword association frameworks in the studied news portals.
Designing Behaviour in Bio-inspired Robots Using Associative Topologies of Spiking-Neural-Networks
Sep 24, 2015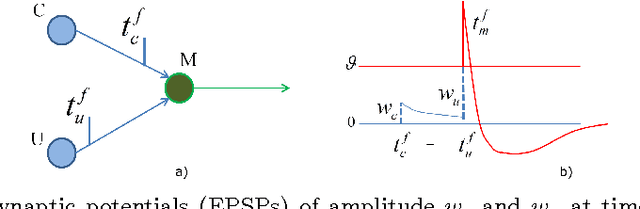
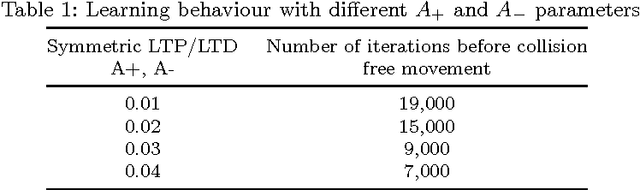
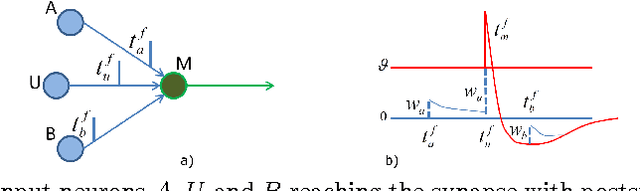
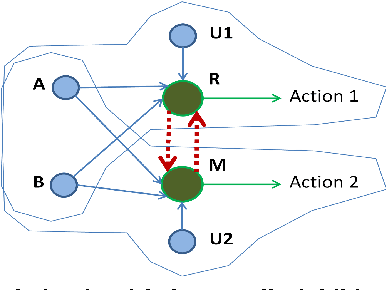
This study explores the design and control of the behaviour of agents and robots using simple circuits of spiking neurons and Spike Timing Dependent Plasticity (STDP) as a mechanism of associative and unsupervised learning. Based on a "reward and punishment" classical conditioning, it is demonstrated that these robots learnt to identify and avoid obstacles as well as to identify and look for rewarding stimuli. Using the simulation and programming environment NetLogo, a software engine for the Integrate and Fire model was developed, which allowed us to monitor in discrete time steps the dynamics of each single neuron, synapse and spike in the proposed neural networks. These spiking neural networks (SNN) served as simple brains for the experimental robots. The Lego Mindstorms robot kit was used for the embodiment of the simulated agents. In this paper the topological building blocks are presented as well as the neural parameters required to reproduce the experiments. This paper summarizes the resulting behaviour as well as the observed dynamics of the neural circuits. The Internet-link to the NetLogo code is included in the annex.
A Model for Foraging Ants, Controlled by Spiking Neural Networks and Double Pheromones
Sep 18, 2015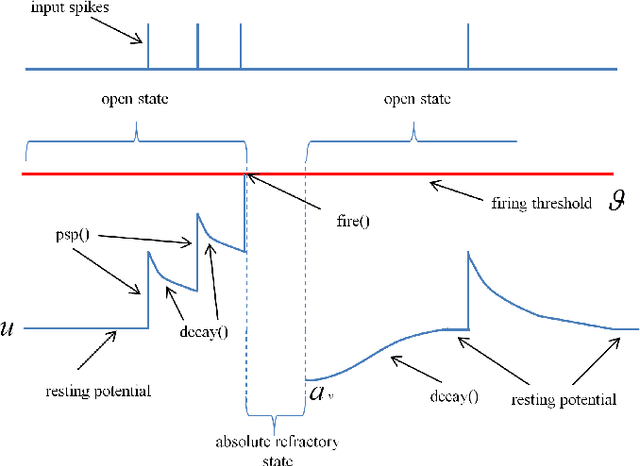

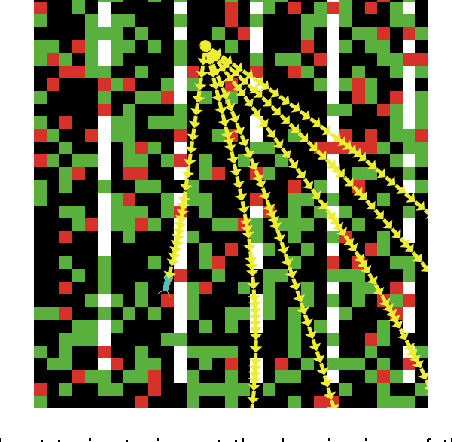

A model of an Ant System where ants are controlled by a spiking neural circuit and a second order pheromone mechanism in a foraging task is presented. A neural circuit is trained for individual ants and subsequently the ants are exposed to a virtual environment where a swarm of ants performed a resource foraging task. The model comprises an associative and unsupervised learning strategy for the neural circuit of the ant. The neural circuit adapts to the environment by means of classical conditioning. The initially unknown environment includes different types of stimuli representing food and obstacles which, when they come in direct contact with the ant, elicit a reflex response in the motor neural system of the ant: moving towards or away from the source of the stimulus. The ants are released on a landscape with multiple food sources where one ant alone would have difficulty harvesting the landscape to maximum efficiency. The introduction of a double pheromone mechanism yields better results than traditional ant colony optimization strategies. Traditional ant systems include mainly a positive reinforcement pheromone. This approach uses a second pheromone that acts as a marker for forbidden paths (negative feedback). This blockade is not permanent and is controlled by the evaporation rate of the pheromones. The combined action of both pheromones acts as a collective stigmergic memory of the swarm, which reduces the search space of the problem. This paper explores how the adaptation and learning abilities observed in biologically inspired cognitive architectures is synergistically enhanced by swarm optimization strategies. The model portraits two forms of artificial intelligent behaviour: at the individual level the spiking neural network is the main controller and at the collective level the pheromone distribution is a map towards the solution emerged by the colony.