 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Reconstruction from Neuromorphic Data
Aug 28, 2024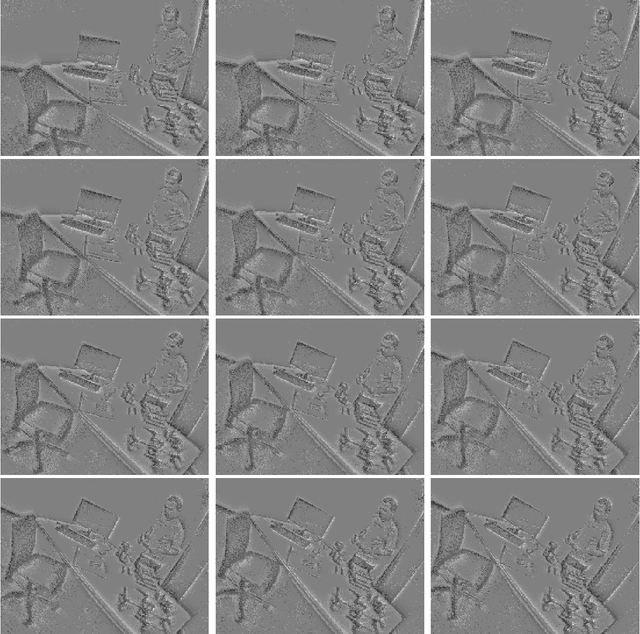
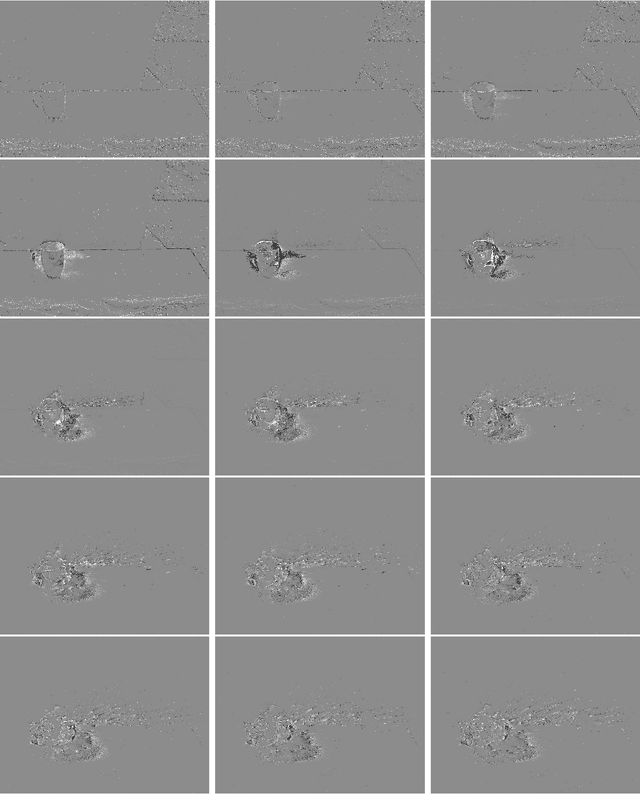
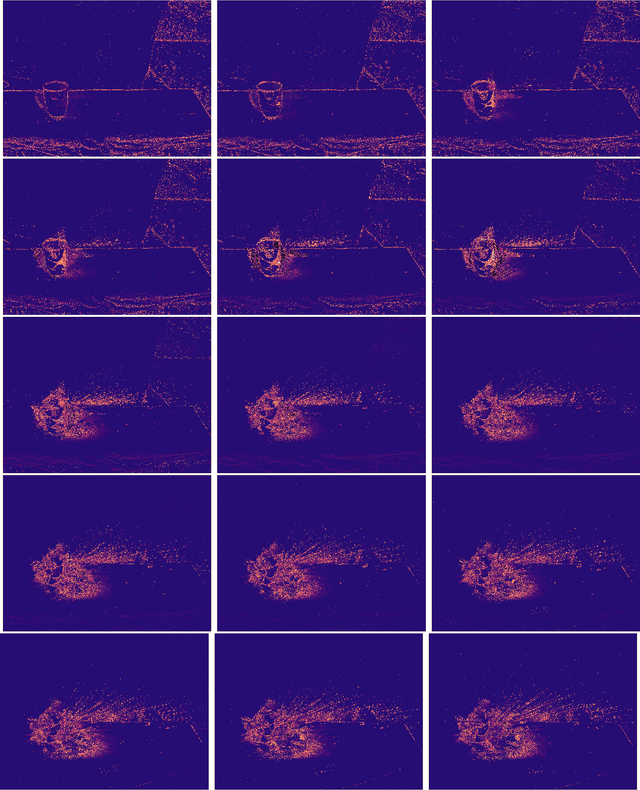
Unlike traditional cameras which synchronously register pixel intensity, neuromorphic sensors only register `changes' at pixels where a change is occurring asynchronously. This enables neuromorphic sensors to sample at a micro-second level and efficiently capture the dynamics. Since, only sequences of asynchronous event changes are recorded rather than brightness intensities over time, many traditional image processing techniques cannot be directly applied. Furthermore, existing approaches, including the ones recently introduced by the authors, use traditional images combined with neuromorphic event data to carry out reconstructions. The aim of this work is introduce an optimization based approach to reconstruct images and dynamics only from the neuromoprhic event data without any additional knowledge of the events. Each pixel is modeled temporally. The experimental results on real data highlight the efficacy of the presented approach, paving the way for efficient and accurate processing of neuromorphic sensor data in real-world applications.
GNEP Based Dynamic Segmentation and Motion Estimation for Neuromorphic Imaging
Jul 08, 2023



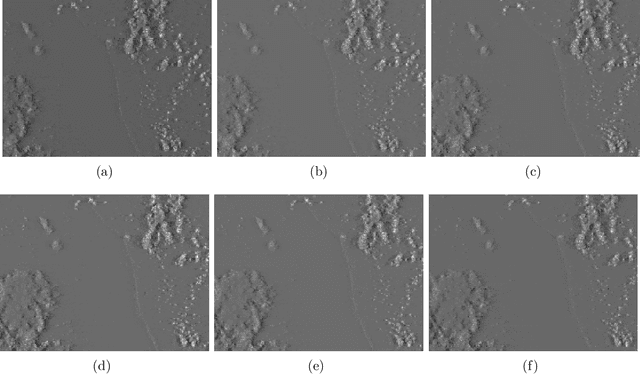
This paper explores the application of event-based cameras in the domains of image segmentation and motion estimation. These cameras offer a groundbreaking technology by capturing visual information as a continuous stream of asynchronous events, departing from the conventional frame-based image acquisition. We introduce a Generalized Nash Equilibrium based framework that leverages the temporal and spatial information derived from the event stream to carry out segmentation and velocity estimation. To establish the theoretical foundations, we derive an existence criteria and propose a multi-level optimization method for calculating equilibrium. The efficacy of this approach is shown through a series of experiments.