 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Synthetic Data in Object Detection on Unmanned Aerial Vehicles
Dec 22, 2021

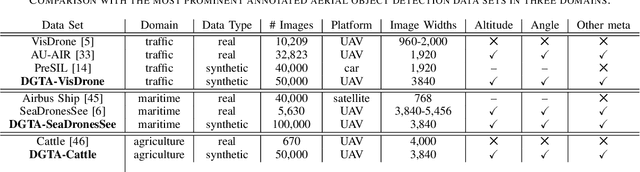
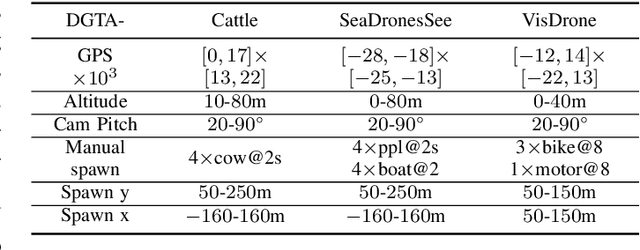
Acquiring data to train deep learning-based object detectors on Unmanned Aerial Vehicles (UAVs) is expensive, time-consuming and may even be prohibited by law in specific environments. On the other hand, synthetic data is fast and cheap to access. In this work, we explore the potential use of synthetic data in object detection from UAVs across various application environments. For that, we extend the open-source framework DeepGTAV to work for UAV scenarios. We capture various large-scale high-resolution synthetic data sets in several domains to demonstrate their use in real-world object detection from UAVs by analyzing multiple training strategies across several models. Furthermore, we analyze several different data generation and sampling parameters to provide actionable engineering advice for further scientific research. The DeepGTAV framework is available at https://git.io/Jyf5j.