 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic 3d regression with projected huber distribution
Mar 09, 2023Estimating probability distributions which describe where an object is likely to be from camera data is a task with many applications. In this work we describe properties which we argue such methods should conform to. We also design a method which conform to these properties. In our experiments we show that our method produces uncertainties which correlate well with empirical errors. We also show that the mode of the predicted distribution outperform our regression baselines. The code for our implementation is available online.
Probabilistic Regression with Huber Distributions
Nov 19, 2021

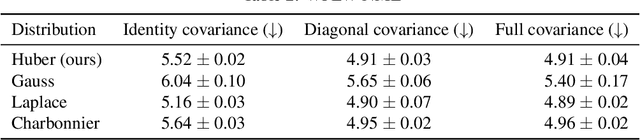
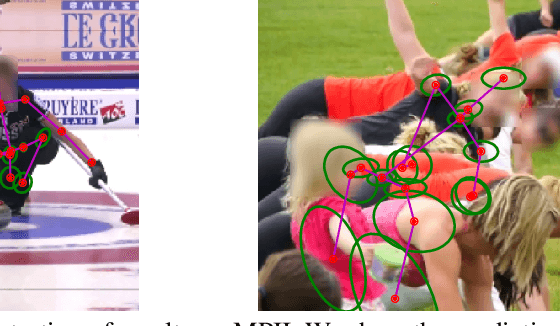
In this paper we describe a probabilistic method for estimating the position of an object along with its covariance matrix using neural networks. Our method is designed to be robust to outliers, have bounded gradients with respect to the network outputs, among other desirable properties. To achieve this we introduce a novel probability distribution inspired by the Huber loss. We also introduce a new way to parameterize positive definite matrices to ensure invariance to the choice of orientation for the coordinate system we regress over. We evaluate our method on popular body pose and facial landmark datasets and get performance on par or exceeding the performance of non-heatmap methods. Our code is available at github.com/Davmo049/Public_prob_regression_with_huber_distributions