 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlumeCityNet: Multi-Resolution Air Quality Forecasting
Oct 14, 2021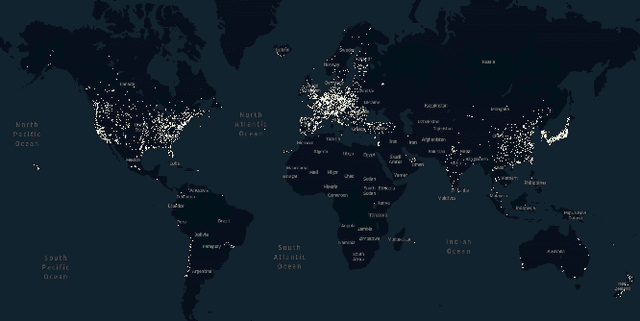

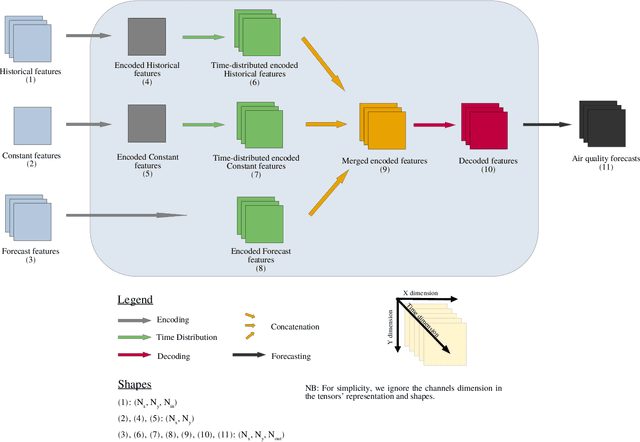

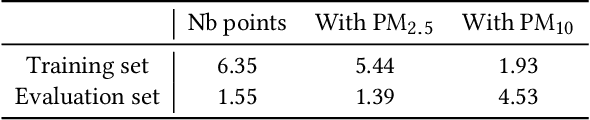
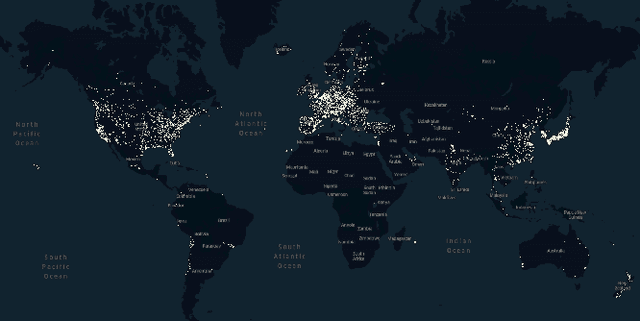
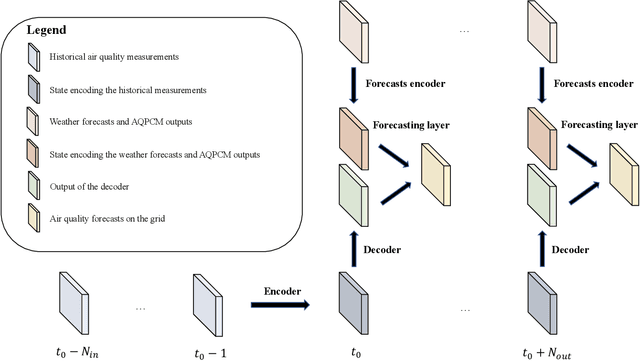
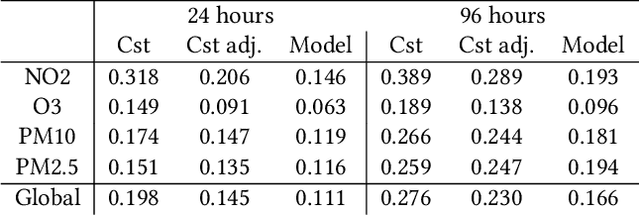
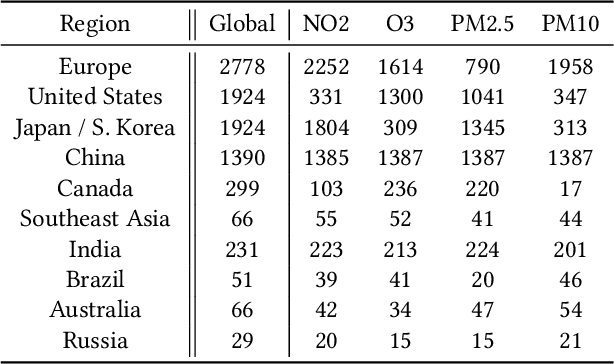
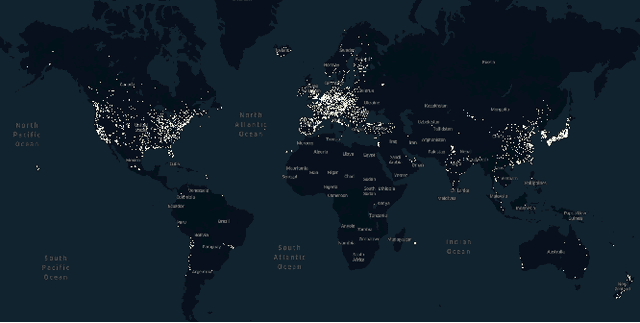
This paper presents an engine able to forecast jointly the concentrations of the main pollutants harming people's health: nitrogen dioxide (NO2), ozone (O3) and particulate matter (PM2.5 and PM10, which are respectively the particles whose diameters are below 2.5um and 10um respectively). The engine is fed with air quality monitoring stations' measurements, weather forecasts, physical models' outputs and traffic estimates to produce forecasts up to 24 hours. The forecasts are produced with several spatial resolutions, from a few dozens of meters to dozens of kilometers, fitting several use-cases needing air quality data. We introduce the Scale-Unit block, which enables to integrate seamlessly all available inputs at a given resolution to return forecasts at the same resolution. Then, the engine is based on a U-Net architecture built with several of those blocks, giving it the ability to process inputs and to output predictions at different resolutions. We have implemented and evaluated the engine on the largest cities in Europe and the United States, and it clearly outperforms other prediction methods. In particular, the out-of-sample accuracy remains high, meaning that the engine can be used in cities which are not included in the training dataset. A valuable advantage of the engine is that it does not need much computing power: the forecasts can be built in a few minutes on a standard CPU. Thus, they can be updated very frequently, as soon as new air quality monitoring stations' measurements are available (generally every hour), which is not the case of physical models traditionally used for air quality forecasting.
High-Resolution Air Quality Prediction Using Low-Cost Sensors
Jun 22, 2020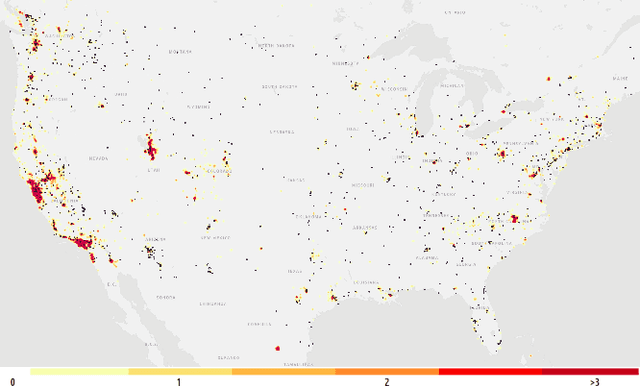

The use of low-cost sensors in air quality monitoring networks is still a much-debated topic among practitioners: they are much cheaper than traditional air quality monitoring stations set up by public authorities (a few hundred dollars compared to a few dozens of thousand dollars) at the cost of a lower accuracy and robustness. This paper presents a case study of using low-cost sensors measurements in an air quality prediction engine. The engine predicts jointly PM2.5 and PM10 concentrations in the United States at a very high resolution in the range of a few dozens of meters. It is fed with the measurements provided by official air quality monitoring stations, the measurements provided by a network of more than 4000 low-cost sensors across the country, and traffic estimates. We show that the use of low-cost sensors' measurements improves the engine's accuracy very significantly. In particular, we derive a strong link between the density of low-cost sensors and the predictions' accuracy: the more low-cost sensors are in an area, the more accurate are the predictions. As an illustration, in areas with the highest density of low-cost sensors, the low-cost sensors' measurements bring a 25% and 15% improvement in PM2.5 and PM10 predictions' accuracy respectively. An other strong conclusion is that in some areas with a high density of low-cost sensors, the engine performs better when fed with low-cost sensors' measurements only than when fed with official monitoring stations' measurements only: this suggests that an air quality monitoring network composed of low-cost sensors is effective in monitoring air quality. This is a very important result, as such a monitoring network is much cheaper to set up.
PlumeNet: Large-Scale Air Quality Forecasting Using A Convolutional LSTM Network
Jun 14, 2020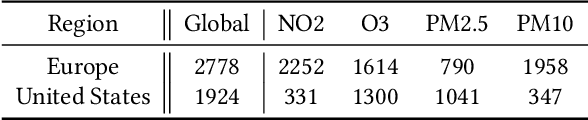
This paper presents an engine able to forecast jointly the concentrations of the main pollutants harming people's health: nitrogen dioxyde (NO2), ozone (O3) and particulate matter (PM2.5 and PM10, which are respectively the particles whose diameters are below 2.5 um and 10 um respectively). The forecasts are performed on a regular grid (the results presented in the paper are produced with a 0.5{\deg} resolution grid over Europe and the United States) with a neural network whose architecture includes convolutional LSTM blocks. The engine is fed with the most recent air quality monitoring stations measures available, weather forecasts as well as air quality physical and chemical model (AQPCM) outputs. The engine can be used to produce air quality forecasts with long time horizons, and the experiments presented in this paper show that the 4 days forecasts beat very significantly simple benchmarks. A valuable advantage of the engine is that it does not need much computing power: the forecasts can be built in a few minutes on a standard GPU. Thus, they can be updated very frequently, as soon as new air quality measures are available (generally every hour), which is not the case of AQPCMs traditionally used for air quality forecasting. The engine described in this paper relies on the same principles as a prediction engine deployed and used by Plume Labs in several products aiming at providing air quality data to individuals and businesses.
DeepPlume: Very High Resolution Real-Time Air Quality Mapping
Feb 14, 2020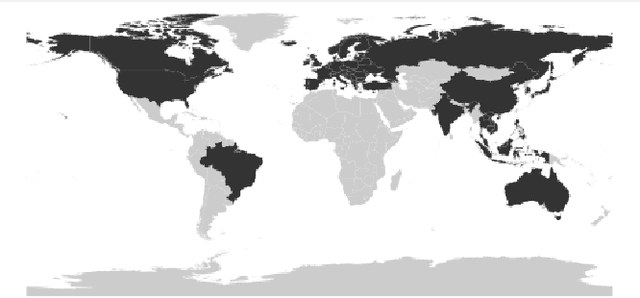

This paper presents an engine able to predict jointly the real-time concentration of the main pollutants harming people's health: nitrogen dioxyde (NO2), ozone (O3) and particulate matter (PM2.5 and PM10, which are respectively the particles whose size are below 2.5 um and 10 um). The engine covers a large part of the world and is fed with real-time official stations measures, atmospheric models' forecasts, land cover data, road networks and traffic estimates to produce predictions with a very high resolution in the range of a few dozens of meters. This resolution makes the engine adapted to very innovative applications like street-level air quality mapping or air quality adjusted routing. Plume Labs has deployed a similar prediction engine to build several products aiming at providing air quality data to individuals and businesses. For the sake of clarity and reproducibility, the engine presented here has been built specifically for this paper and differs quite significantly from the one used in Plume Labs' products. A major difference is in the data sources feeding the engine: in particular, this prediction engine does not include mobile sensors measurements.