 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robotic Line Scan System with Adaptive ROI for Inspection of Defects over Convex Free-form Specular Surfaces
Aug 25, 2020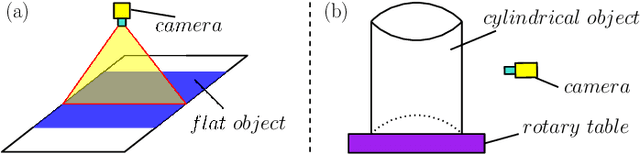
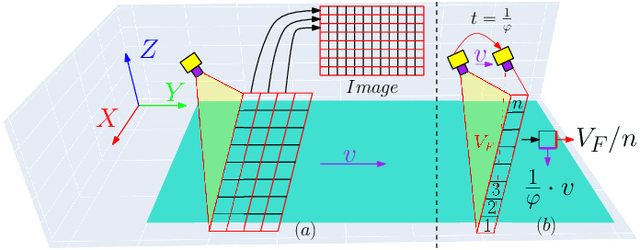
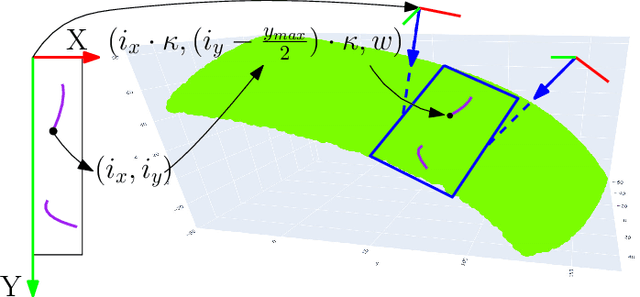
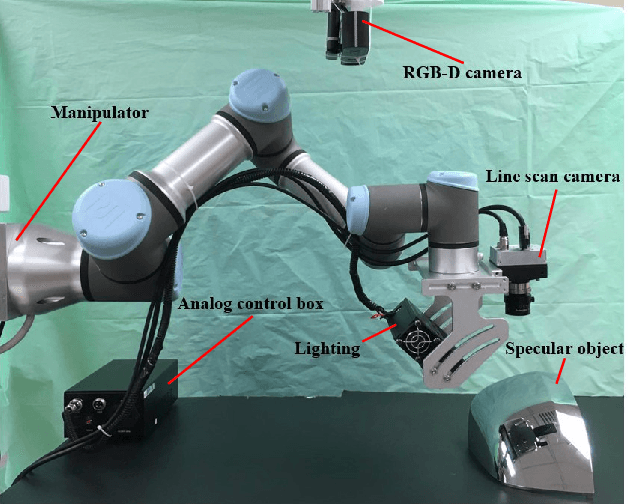
In this paper, we present a new robotic system to perform defect inspection tasks over free-form specular surfaces. The autonomous procedure is achieved by a six-DOF manipulator, equipped with a line scan camera and a high-intensity lighting system. Our method first uses the object's CAD mesh model to implement a K-means unsupervised learning algorithm that segments the object's surface into areas with similar curvature. Then, the scanning path is computed by using an adaptive algorithm that adjusts the camera's ROI to observe regions with irregular shapes properly. A novel iterative closest point-based projection registration method that robustly localizes the object in the robot's coordinate frame system is proposed to deal with the blind spot problem of specular objects captured by depth sensors. Finally, an image processing pipeline automatically detects surface defects in the captured high-resolution images. A detailed experimental study with a vision-guided robotic scanning system is reported to validate the proposed methodology.
IBSEAD: - A Self-Evolving Self-Obsessed Learning Algorithm for Machine Learning
Jun 30, 2011We present IBSEAD or distributed autonomous entity systems based Interaction - a learning algorithm for the computer to self-evolve in a self-obsessed manner. This learning algorithm will present the computer to look at the internal and external environment in series of independent entities, which will interact with each other, with and/or without knowledge of the computer's brain. When a learning algorithm interacts, it does so by detecting and understanding the entities in the human algorithm. However, the problem with this approach is that the algorithm does not consider the interaction of the third party or unknown entities, which may be interacting with each other. These unknown entities in their interaction with the non-computer entities make an effect in the environment that influences the information and the behaviour of the computer brain. Such details and the ability to process the dynamic and unsettling nature of these interactions are absent in the current learning algorithm such as the decision tree learning algorithm. IBSEAD is able to evaluate and consider such algorithms and thus give us a better accuracy in simulation of the highly evolved nature of the human brain. Processes such as dreams, imagination and novelty, that exist in humans are not fully simulated by the existing learning algorithms. Also, Hidden Markov models (HMM) are useful in finding "hidden" entities, which may be known or unknown. However, this model fails to consider the case of unknown entities which maybe unclear or unknown. IBSEAD is better because it considers three types of entities- known, unknown and invisible. We present our case with a comparison of existing algorithms in known environments and cases and present the results of the experiments using dry run of the simulated runs of the existing machine learning algorithms versus IBSEAD.
* Keywords: Self-evolving algorithm; machine learning; decision-trees; learning algorithms, Hidden Markov Models; http://ijcset.excelingtech.co.uk/vol1issue4/14-vol1issue4.pdf
Implementing Human-like Intuition Mechanism in Artificial Intelligence
Jun 29, 2011
Human intuition has been simulated by several research projects using artificial intelligence techniques. Most of these algorithms or models lack the ability to handle complications or diversions. Moreover, they also do not explain the factors influencing intuition and the accuracy of the results from this process. In this paper, we present a simple series based model for implementation of human-like intuition using the principles of connectivity and unknown entities. By using Poker hand datasets and Car evaluation datasets, we compare the performance of some well-known models with our intuition model. The aim of the experiment was to predict the maximum accurate answers using intuition based models. We found that the presence of unknown entities, diversion from the current problem scenario, and identifying weakness without the normal logic based execution, greatly affects the reliability of the answers. Generally, the intuition based models cannot be a substitute for the logic based mechanisms in handling such problems. The intuition can only act as a support for an ongoing logic based model that processes all the steps in a sequential manner. However, when time and computational cost are very strict constraints, this intuition based model becomes extremely important and useful, because it can give a reasonably good performance. Factors affecting intuition are analyzed and interpreted through our model.