 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Analysis of Stability, Sensitivity and Transparency in Variable Admittance Control for pHRI Enhanced by Virtual Fixtures
Mar 06, 2025



The interest in Physical Human-Robot Interaction (pHRI) has significantly increased over the last two decades thanks to the availability of collaborative robots that guarantee user safety during force exchanges. For this reason, stability concerns have been addressed extensively in the literature while proposing new control schemes for pHRI applications. Because of the nonlinear nature of robots, stability analyses generally leverage passivity concepts. On the other hand, the proposed algorithms generally consider ideal models of robot manipulators. For this reason, the primary objective of this paper is to conduct a detailed analysis of the sources of instability for a class of pHRI control schemes, namely proxy-based constrained admittance controllers, by considering parasitic effects such as transmission elasticity, motor velocity saturation, and actuation delay. Next, a sensitivity analysis supported by experimental results is carried out, in order to identify how the control parameters affect the stability of the overall system. Finally, an adaptation technique for the proxy parameters is proposed with the goal of maximizing transparency in pHRI. The proposed adaptation method is validated through both simulations and experimental tests.
Optimizing Design and Control Methods for Using Collaborative Robots in Upper-Limb Rehabilitation
Jul 26, 2024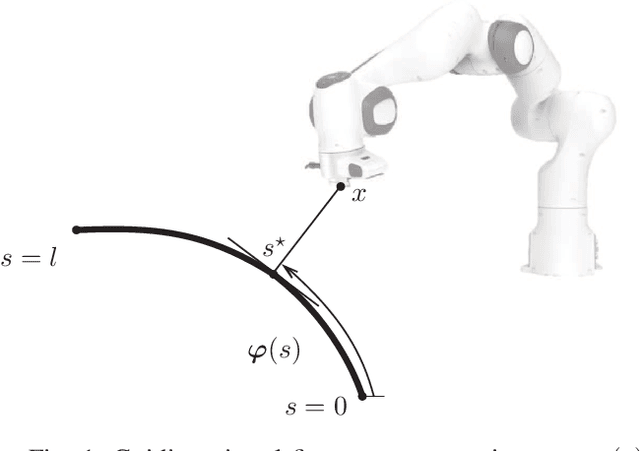
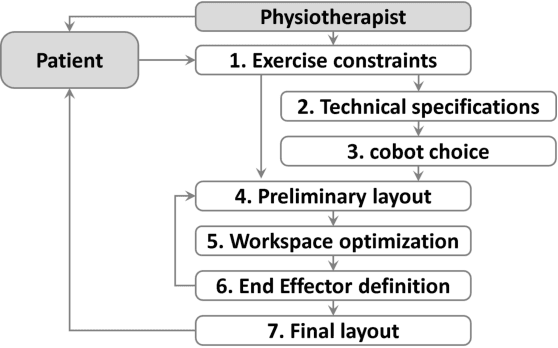
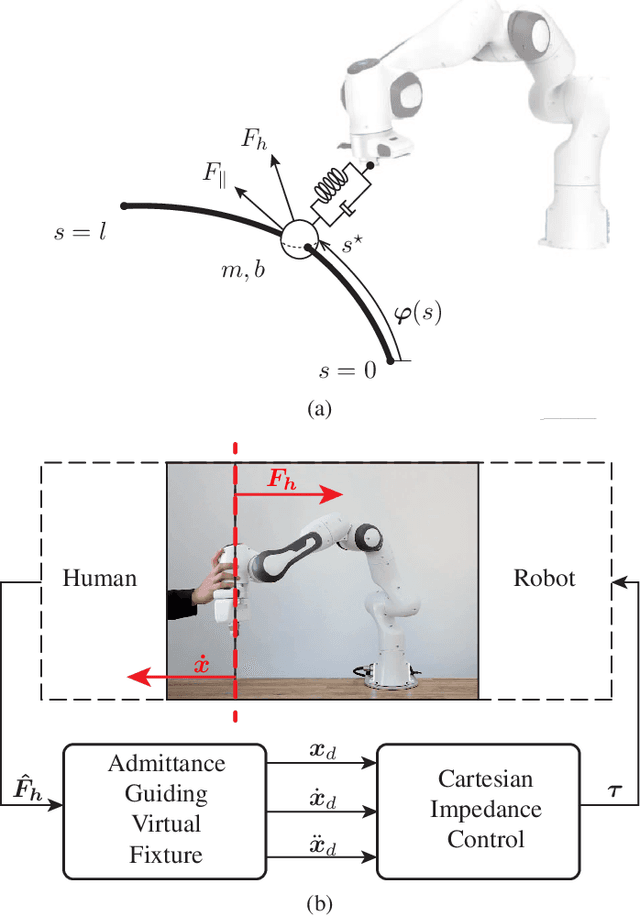
In this paper, we address the development of a robotic rehabilitation system for the upper limbs based on collaborative end-effector solutions. The use of commercial collaborative robots offers significant advantages for this task, as they are optimized from an engineering perspective and ensure safe physical interaction with humans. However, they also come with noticeable drawbacks, such as the limited range of sizes available on the market and the standard control modes, which are primarily oriented towards industrial or service applications. To address these limitations, we propose an optimization-based design method to fully exploit the capability of the cobot in performing rehabilitation tasks. Additionally, we introduce a novel control architecture based on an admittance-type Virtual Fixture method, which constrains the motion of the robot along a prescribed path. This approach allows for an intuitive definition of the task to be performed via Programming by Demonstration and enables the system to operate both passively and actively. In passive mode, the system supports the patient during task execution with additional force, while in active mode, it opposes the motion with a braking force. Experimental results demonstrate the effectiveness of the proposed method.