 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhytNet -- Tailored Convolutional Neural Networks for Custom Botanical Data
Nov 20, 2023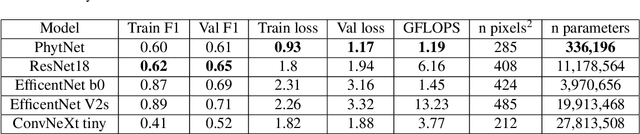
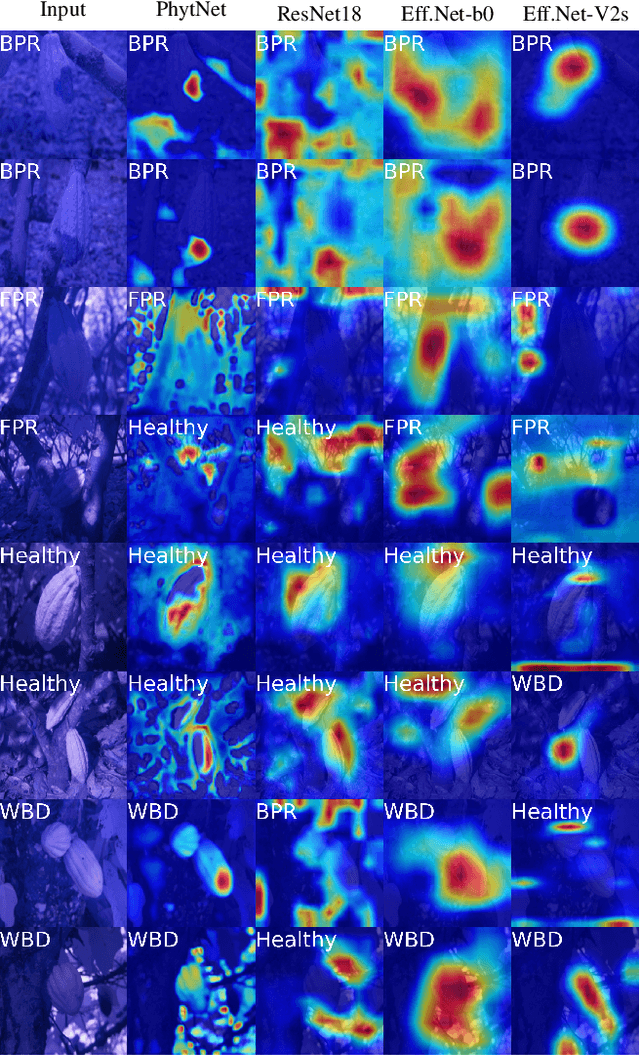
Automated disease, weed and crop classification with computer vision will be invaluable in the future of agriculture. However, existing model architectures like ResNet, EfficientNet and ConvNeXt often underperform on smaller, specialised datasets typical of such projects. We address this gap with informed data collection and the development of a new CNN architecture, PhytNet. Utilising a novel dataset of infrared cocoa tree images, we demonstrate PhytNet's development and compare its performance with existing architectures. Data collection was informed by analysis of spectroscopy data, which provided useful insights into the spectral characteristics of cocoa trees. Such information could inform future data collection and model development. Cocoa was chosen as a focal species due to the diverse pathology of its diseases, which pose significant challenges for detection. ResNet18 showed some signs of overfitting, while EfficientNet variants showed distinct signs of overfitting. By contrast, PhytNet displayed excellent attention to relevant features, no overfitting, and an exceptionally low computation cost (1.19 GFLOPS). As such PhytNet is a promising candidate for rapid disease or plant classification, or precise localisation of disease symptoms for autonomous systems.
Quality Evolvability ES: Evolving Individuals With a Distribution of Well Performing and Diverse Offspring
Mar 19, 2021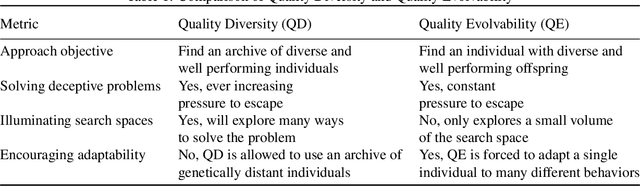
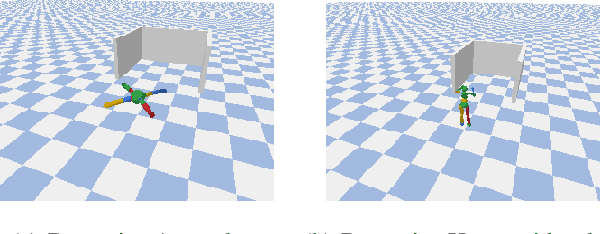
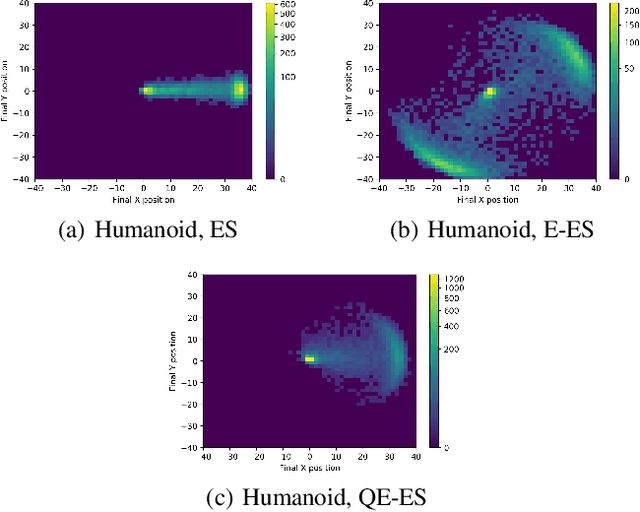
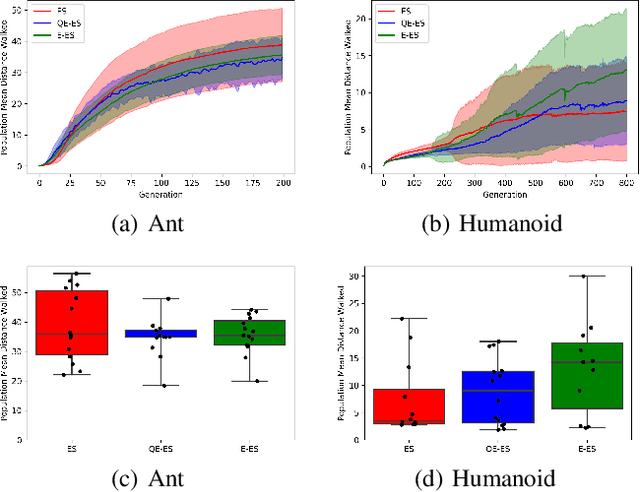
One of the most important lessons from the success of deep learning is that learned representations tend to perform much better at any task compared to representations we design by hand. Yet evolution of evolvability algorithms, which aim to automatically learn good genetic representations, have received relatively little attention, perhaps because of the large amount of computational power they require. The recent method Evolvability ES allows direct selection for evolvability with little computation. However, it can only be used to solve problems where evolvability and task performance are aligned. We propose Quality Evolvability ES, a method that simultaneously optimizes for task performance and evolvability and without this restriction. Our proposed approach Quality Evolvability has similar motivation to Quality Diversity algorithms, but with some important differences. While Quality Diversity aims to find an archive of diverse and well-performing, but potentially genetically distant individuals, Quality Evolvability aims to find a single individual with a diverse and well-performing distribution of offspring. By doing so Quality Evolvability is forced to discover more evolvable representations. We demonstrate on robotic locomotion control tasks that Quality Evolvability ES, similarly to Quality Diversity methods, can learn faster than objective-based methods and can handle deceptive problems.