 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Event-Triggered Framework for Trust-Mediated Human-Autonomy Interaction
Dec 12, 2024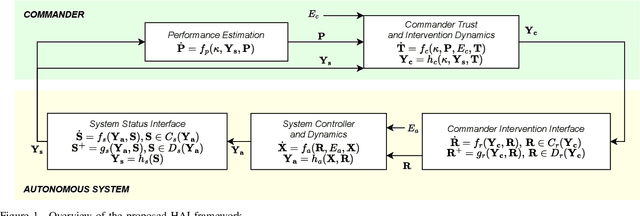
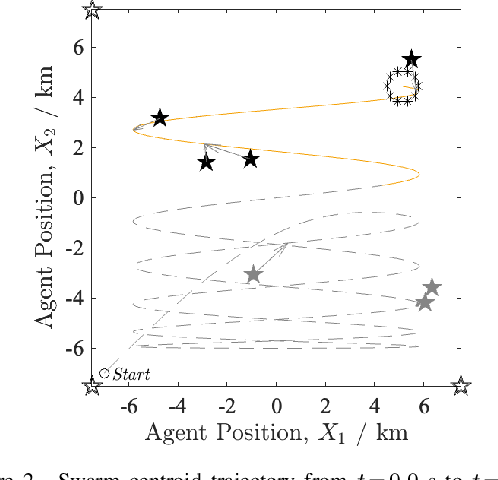
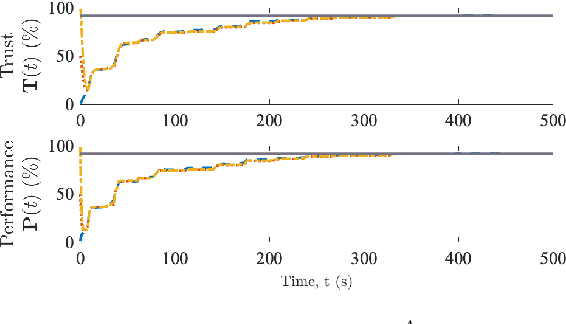
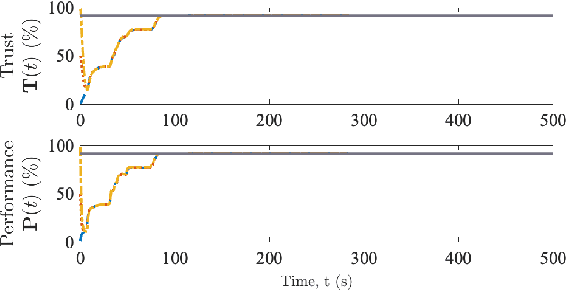
Inspired by the increased cooperation between humans and autonomous systems, we present a new hybrid systems framework capturing the interconnected dynamics underlying these interactions. The framework accommodates models arising from both the autonomous systems and cognitive psychology literature in order to represent key elements such as human trust in the autonomous system. The intermittent nature of human interactions are incorporated by asynchronous event-triggered sampling at the framework's human-autonomous system interfaces. We illustrate important considerations for tuning framework parameters by investigating a practical application to an autonomous robotic swarm search and rescue scenario. In this way, we demonstrate how the proposed framework may assist in designing more efficient and effective interactions between humans and autonomous systems.