 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Sep 14, 2024
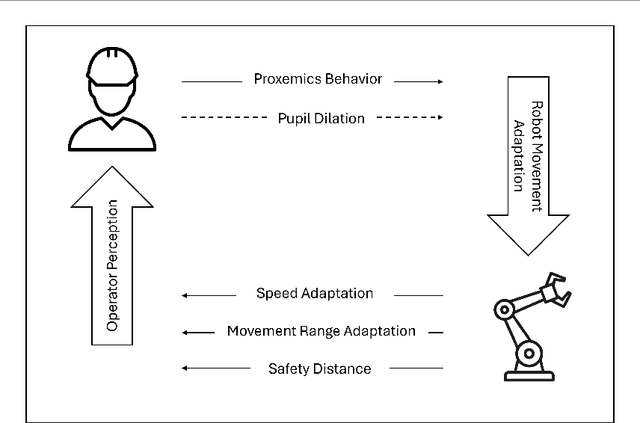


Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Using vs. Purchasing Industrial Robots: Adding an Organizational Perspective to Industrial HRI
Sep 08, 2024


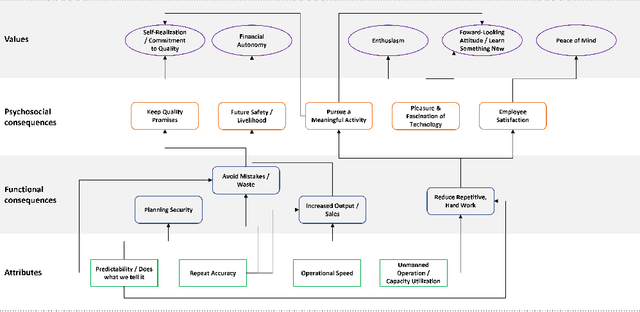
Purpose: Industrial robots allow manufacturing companies to increase productivity and remain competitive. For robots to be used, they must be accepted by operators on the one hand and bought by decision-makers on the other. The roles involved in such organizational processes have very different perspectives. It is therefore essential for suppliers and robot customers to understand these motives so that robots can successfully be integrated on manufacturing shopfloors. Methodology: We present findings of a qualitative study with operators and decision-makers from two Swiss manufacturing SMEs. Using laddering interviews and means-end analysis, we compare operators' and deciders' relevant elements and how these elements are linked to each other on different abstraction levels. These findings represent drivers and barriers to the acquisition, integration and acceptance of robots in the industry. Findings: We present the differing foci of operators and deciders, and how they can be used by demanders as well as suppliers of robots to achieve robot acceptance and deployment. First, we present a list of relevant attributes, consequences and values that constitute robot acceptance and/or rejection. Second, we provide quantified relevancies for these elements, and how they differ between operators and deciders. And third, we demonstrate how the elements are linked with each other on different abstraction levels, and how these links differ between the two groups.
The Influence of Demographic Variation on the Perception of Industrial Robot Movements
Sep 08, 2024The influence of individual differences on the perception and evaluation of interactions with robots has been researched for decades. Some human demographic characteristics have been shown to affect how individuals perceive interactions with robots. Still, it is to-date not clear whether, which and to what extent individual differences influence how we perceive robots, and even less is known about human factors and their effect on the perception of robot movements. In addition, most results on the relevance of individual differences investigate human-robot interactions with humanoid or social robots whereas interactions with industrial robots are underrepresented. We present a literature review on the relationship of robot movements and the influence of demographic variation. Our review reveals a limited comparability of existing findings due to a lack of standardized robot manipulations, various dependent variables used and differing experimental setups including different robot types. In addition, most studies have insufficient sample sizes to derive generalizable results. To overcome these shortcomings, we report the results from a Web-based experiment with 930 participants that studies the effect of demographic characteristics on the evaluation of movement behaviors of an articulated robot arm. Our findings demonstrate that most participants prefer an approach from the side, a large movement range, conventional numbers of rotations, smooth movements and neither fast nor slow movement speeds. Regarding individual differences, most of these preferences are robust to demographic variation, and only gender and age was found to cause slight preference differences between slow and fast movements.