 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvSegSNN: Neuromorphic Semantic Segmentation for Event Data
Jun 20, 2024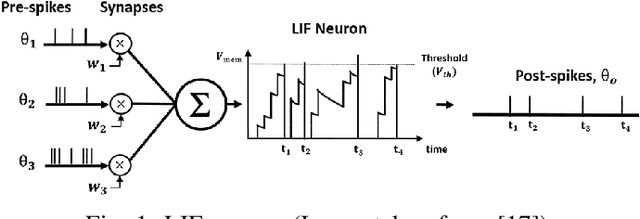
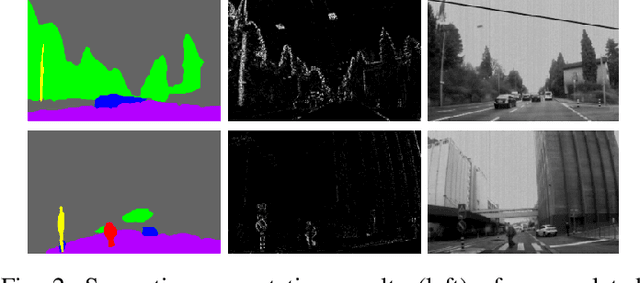
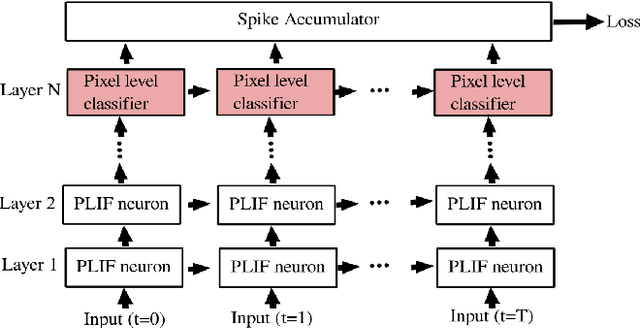
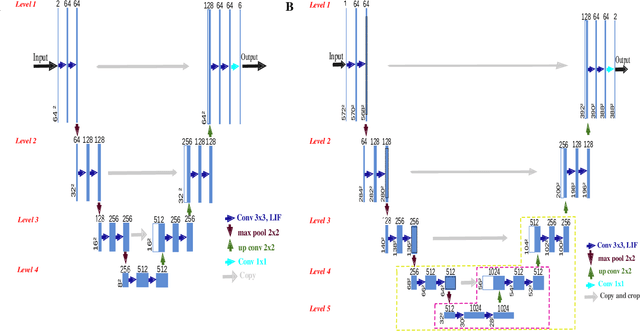
Semantic segmentation is an important computer vision task, particularly for scene understanding and navigation of autonomous vehicles and UAVs. Several variations of deep neural network architectures have been designed to tackle this task. However, due to their huge computational costs and their high memory consumption, these models are not meant to be deployed on resource-constrained systems. To address this limitation, we introduce an end-to-end biologically inspired semantic segmentation approach by combining Spiking Neural Networks (SNNs, a low-power alternative to classical neural networks) with event cameras whose output data can directly feed these neural network inputs. We have designed EvSegSNN, a biologically plausible encoder-decoder U-shaped architecture relying on Parametric Leaky Integrate and Fire neurons in an objective to trade-off resource usage against performance. The experiments conducted on DDD17 demonstrate that EvSegSNN outperforms the closest state-of-the-art model in terms of MIoU while reducing the number of parameters by a factor of $1.6$ and sparing a batch normalization stage.