 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBudget-based real-time Executor for Micro-ROS
May 18, 2021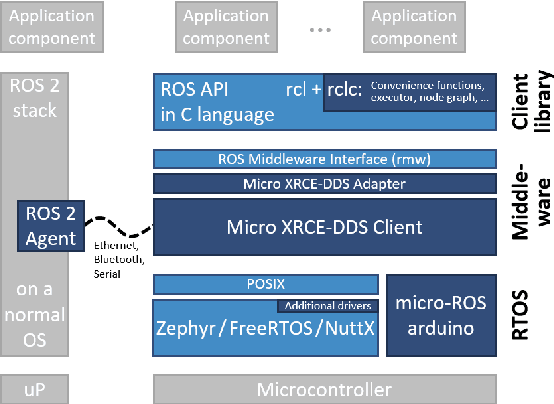
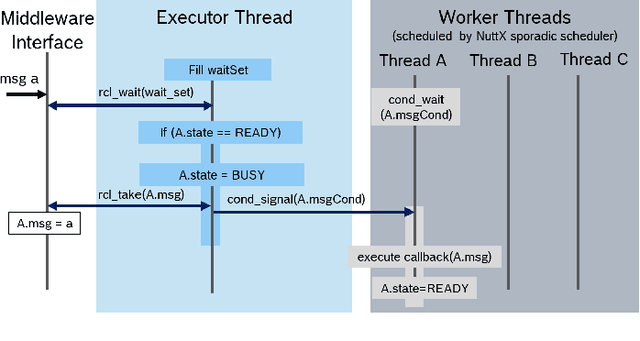
The Robot Operating System (ROS) is a popular robotics middleware framework. In the last years, it underwent a redesign and reimplementation under the name ROS~2. It now features QoS-configurable communication and a flexible layered architecture. Micro-ROS is a variant developed specifically for resource-constrained microcontrollers (MCU). Such MCUs are commonly used in robotics for sensors and actuators, for time-critical control functions, and for safety. While the execution management of ROS 2 has been addressed by an Executor concept, its lack of real-time capabilities make it unsuitable for industrial use. Neither defining an execution order nor the assignment of scheduling parameters to tasks is possible, despite the fact that advanced real-time scheduling algorithms are well-known and available in modern RTOS's. For example, the NuttX RTOS supports a variant of the reservation-based scheduling which is very attractive for industrial applications: It allows to assign execution time budgets to software components so that a system integrator can thereby guarantee the real-time requirements of the entire system. This paper presents for the first time a ROS~2 Executor design which enables the real-time scheduling capabilities of the operating system. In particular, we successfully demonstrate the budget-based scheduling of the NuttX RTOS with a micro-ROS application on an STM32 microcontroller.