Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Pipeline for Segmenting and Structuring RGB-D Data for Robotics Applications
Oct 23, 2024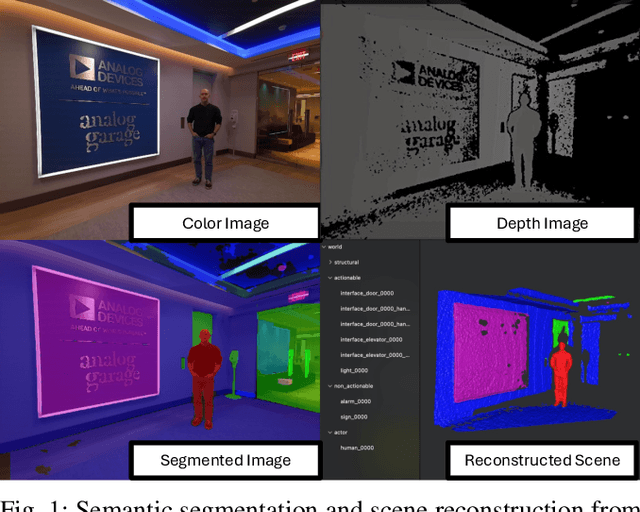
We introduce a novel pipeline for segmenting and structuring color and depth (RGB-D) data. Existing processing pipelines for RGB-D data have focused on extracting geometric information alone. This approach precludes the development of more advanced robotic navigation and manipulation algorithms, which benefit from a semantic understanding of their environment. Our pipeline can segment RGB-D data into accurate semantic masks. These masks are then used to fuse raw captured point clouds into semantically separated point clouds. We store this information using the Universal Scene Description (USD) file format, a format suitable for easy querying by downstream robotics algorithms, human-friendly visualization, and robotics simulation.
Via