 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeRF-Accelerated Ecological Monitoring in Mixed-Evergreen Redwood Forest
Oct 09, 2024Forest mapping provides critical observational data needed to understand the dynamics of forest environments. Notably, tree diameter at breast height (DBH) is a metric used to estimate forest biomass and carbon dioxide (CO$_2$) sequestration. Manual methods of forest mapping are labor intensive and time consuming, a bottleneck for large-scale mapping efforts. Automated mapping relies on acquiring dense forest reconstructions, typically in the form of point clouds. Terrestrial laser scanning (TLS) and mobile laser scanning (MLS) generate point clouds using expensive LiDAR sensing, and have been used successfully to estimate tree diameter. Neural radiance fields (NeRFs) are an emergent technology enabling photorealistic, vision-based reconstruction by training a neural network on a sparse set of input views. In this paper, we present a comparison of MLS and NeRF forest reconstructions for the purpose of trunk diameter estimation in a mixed-evergreen Redwood forest. In addition, we propose an improved DBH-estimation method using convex-hull modeling. Using this approach, we achieved 1.68 cm RMSE, which consistently outperformed standard cylinder modeling approaches. Our code contributions and forest datasets are freely available at https://github.com/harelab-ucsc/RedwoodNeRF.
Evaluating geometric accuracy of NeRF reconstructions compared to SLAM method
Jul 15, 2024As Neural Radiance Field (NeRF) implementations become faster, more efficient and accurate, their applicability to real world mapping tasks becomes more accessible. Traditionally, 3D mapping, or scene reconstruction, has relied on expensive LiDAR sensing. Photogrammetry can perform image-based 3D reconstruction but is computationally expensive and requires extremely dense image representation to recover complex geometry and photorealism. NeRFs perform 3D scene reconstruction by training a neural network on sparse image and pose data, achieving superior results to photogrammetry with less input data. This paper presents an evaluation of two NeRF scene reconstructions for the purpose of estimating the diameter of a vertical PVC cylinder. One of these are trained on commodity iPhone data and the other is trained on robot-sourced imagery and poses. This neural-geometry is compared to state-of-the-art lidar-inertial SLAM in terms of scene noise and metric-accuracy.
Towards Deep Learning for Predicting Microbial Fuel Cell Energy Output
Jun 17, 2024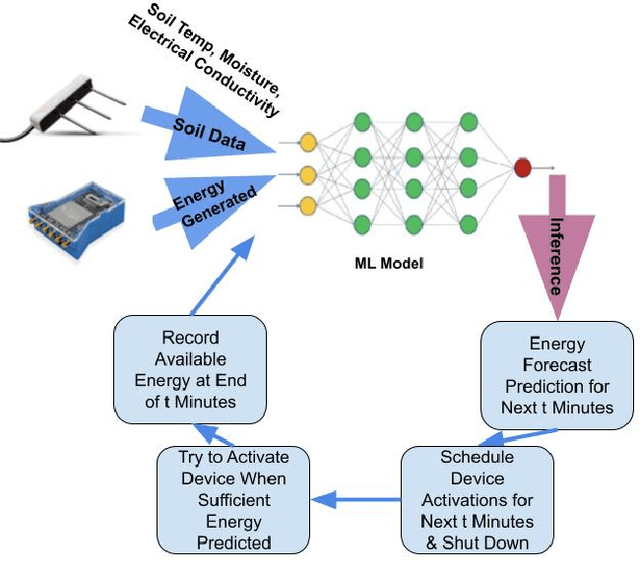
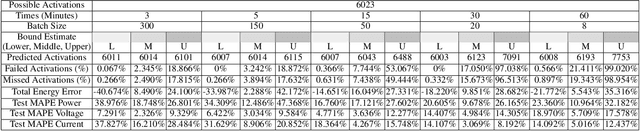
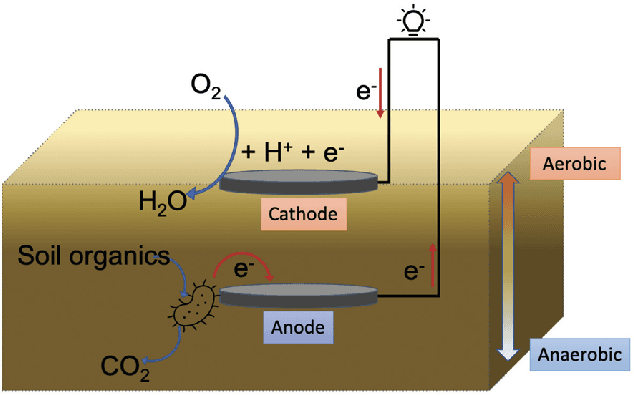
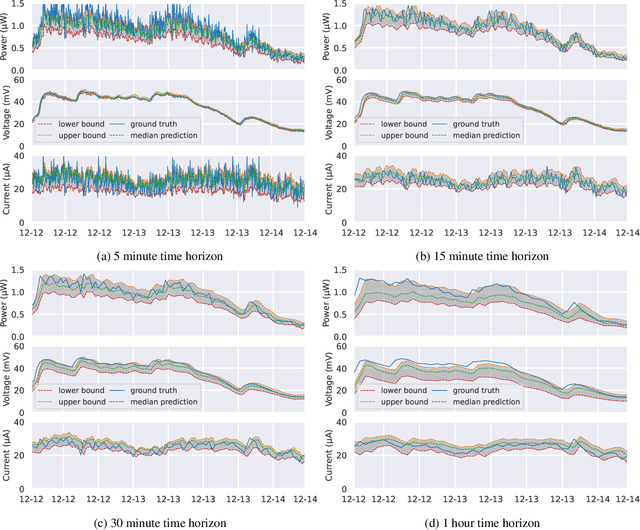
Soil microbial fuel cells (SMFCs) are an emerging technology which offer clean and renewable energy in environments where more traditional power sources, such as chemical batteries or solar, are not suitable. With further development, SMFCs show great promise for use in robust and affordable outdoor sensor networks, particularly for farmers. One of the greatest challenges in the development of this technology is understanding and predicting the fluctuations of SMFC energy generation, as the electro-generative process is not yet fully understood. Very little work currently exists attempting to model and predict the relationship between soil conditions and SMFC energy generation, and we are the first to use machine learning to do so. In this paper, we train Long Short Term Memory (LSTM) models to predict the future energy generation of SMFCs across timescales ranging from 3 minutes to 1 hour, with results ranging from 2.33% to 5.71% MAPE for median voltage prediction. For each timescale, we use quantile regression to obtain point estimates and to establish bounds on the uncertainty of these estimates. When comparing the median predicted vs. actual values for the total energy generated during the testing period, the magnitude of prediction errors ranged from 2.29% to 16.05%. To demonstrate the real-world utility of this research, we also simulate how the models could be used in an automated environment where SMFC-powered devices shut down and activate intermittently to preserve charge, with promising initial results. Our deep learning-based prediction and simulation framework would allow a fully automated SMFC-powered device to achieve a median 100+% increase in successful operations, compared to a naive model that schedules operations based on the average voltage generated in the past.