 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal Ethical Obligations in Reinforcement Learning Agents: Verification and Policy Updates
Jul 31, 2024When designing agents for operation in uncertain environments, designers need tools to automatically reason about what agents ought to do, how that conflicts with what is actually happening, and how a policy might be modified to remove the conflict. These obligations include ethical and social obligations, permissions and prohibitions, which constrain how the agent achieves its mission and executes its policy. We propose a new deontic logic, Expected Act Utilitarian deontic logic, for enabling this reasoning at design time: for specifying and verifying the agent's strategic obligations, then modifying its policy from a reference policy to meet those obligations. Unlike approaches that work at the reward level, working at the logical level increases the transparency of the trade-offs. We introduce two algorithms: one for model-checking whether an RL agent has the right strategic obligations, and one for modifying a reference decision policy to make it meet obligations expressed in our logic. We illustrate our algorithms on DAC-MDPs which accurately abstract neural decision policies, and on toy gridworld environments.
Algorithmic Ethics: Formalization and Verification of Autonomous Vehicle Obligations
May 06, 2021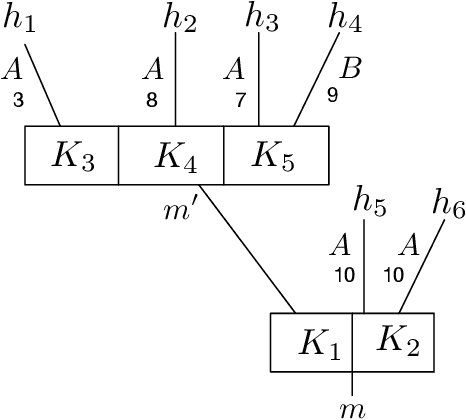
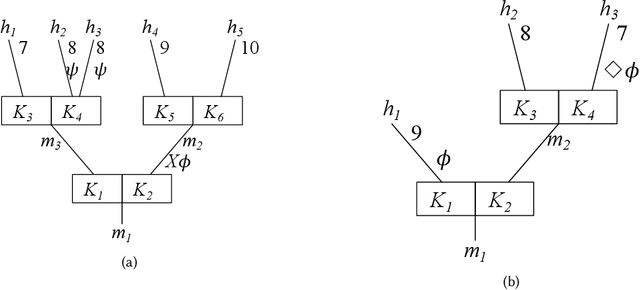
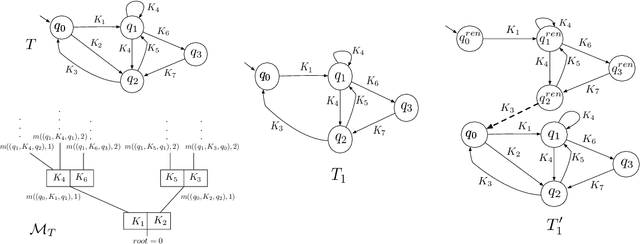
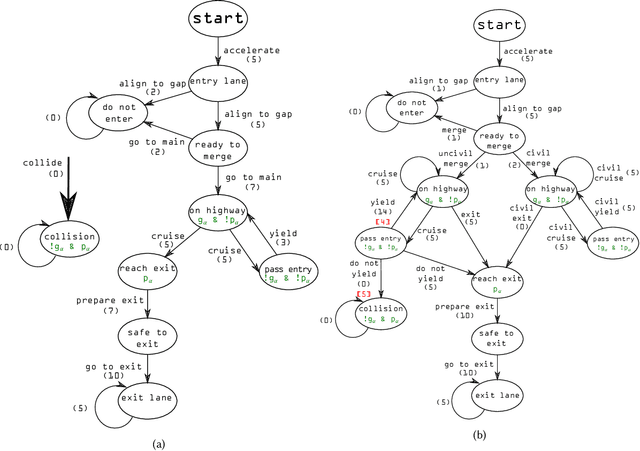
We develop a formal framework for automatic reasoning about the obligations of autonomous cyber-physical systems, including their social and ethical obligations. Obligations, permissions and prohibitions are distinct from a system's mission, and are a necessary part of specifying advanced, adaptive AI-equipped systems. They need a dedicated deontic logic of obligations to formalize them. Most existing deontic logics lack corresponding algorithms and system models that permit automatic verification. We demonstrate how a particular deontic logic, Dominance Act Utilitarianism (DAU), is a suitable starting point for formalizing the obligations of autonomous systems like self-driving cars. We demonstrate its usefulness by formalizing a subset of Responsibility-Sensitive Safety (RSS) in DAU; RSS is an industrial proposal for how self-driving cars should and should not behave in traffic. We show that certain logical consequences of RSS are undesirable, indicating a need to further refine the proposal. We also demonstrate how obligations can change over time, which is necessary for long-term autonomy. We then demonstrate a model-checking algorithm for DAU formulas on weighted transition systems, and illustrate it by model-checking obligations of a self-driving car controller from the literature.