 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBest Viewpoint Tracking for Camera Mounted on Robotic Arm with Dynamic Obstacles
Oct 17, 2017
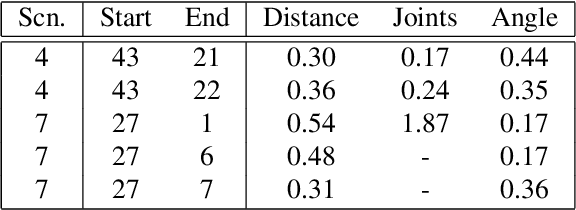
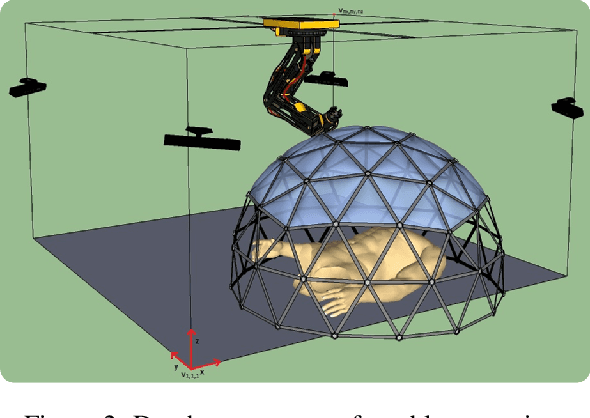
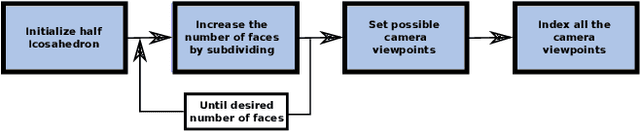
The problem of finding a next best viewpoint for 3D modeling or scene mapping has been explored in computer vision over the last decade. This paper tackles a similar problem, but with different characteristics. It proposes a method for dynamic next best viewpoint recovery of a target point while avoiding possible occlusions. Since the environment can change, the method has to iteratively find the next best view with a global understanding of the free and occupied parts. We model the problem as a set of possible viewpoints which correspond to the centers of the facets of a virtual tessellated hemisphere covering the scene. Taking into account occlusions, distances between current and future viewpoints, quality of the viewpoint and joint constraints (robot arm joint distances or limits), we evaluate the next best viewpoint. The proposal has been evaluated on 8 different scenarios with different occlusions and a short 3D video sequence to validate its dynamic performance.
Intensity Video Guided 4D Fusion for Improved Highly Dynamic 3D Reconstruction
Aug 06, 2017



The availability of high-speed 3D video sensors has greatly facilitated 3D shape acquisition of dynamic and deformable objects, but high frame rate 3D reconstruction is always degraded by spatial noise and temporal fluctuations. This paper presents a simple yet powerful intensity video guided multi-frame 4D fusion pipeline. Temporal tracking of intensity image points (of moving and deforming objects) allows registration of the corresponding 3D data points, whose 3D noise and fluctuations are then reduced by spatio-temporal multi-frame 4D fusion. We conducted simulated noise tests and real experiments on four 3D objects using a 1000 fps 3D video sensor. The results demonstrate that the proposed algorithm is effective at reducing 3D noise and is robust against intensity noise. It outperforms existing algorithms with good scalability on both stationary and dynamic objects.