 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Value of Inferring the Internal State of Traffic Participants for Autonomous Freeway Driving
Feb 02, 2017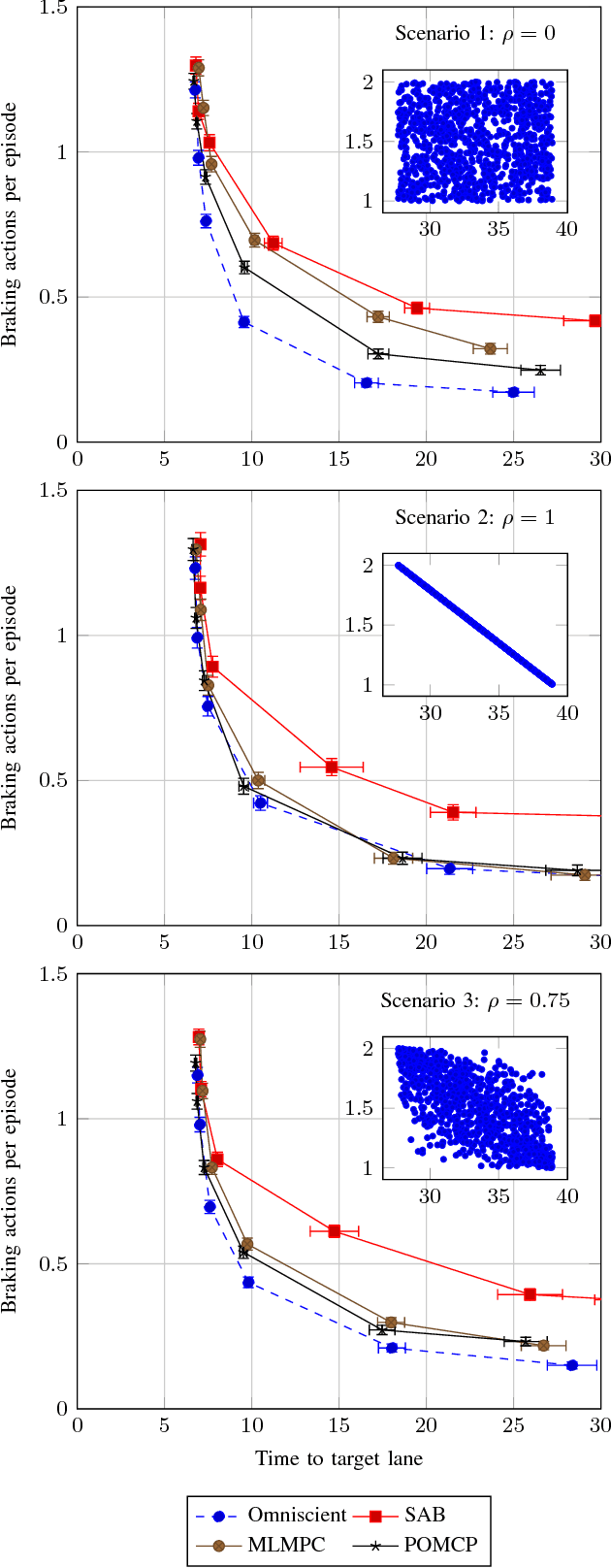
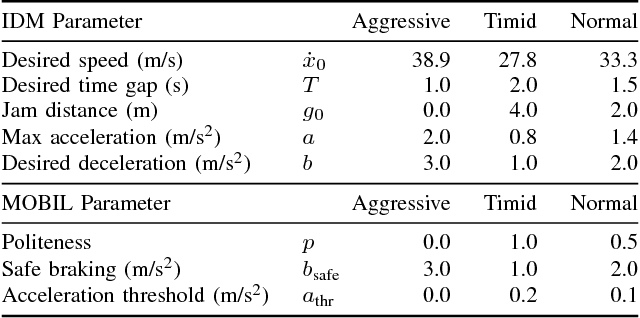
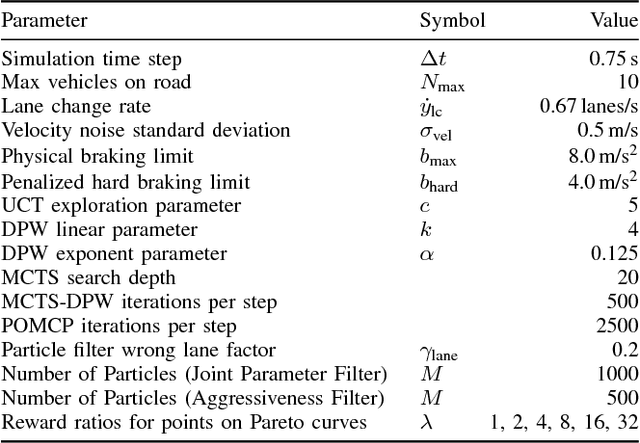
Safe interaction with human drivers is one of the primary challenges for autonomous vehicles. In order to plan driving maneuvers effectively, the vehicle's control system must infer and predict how humans will behave based on their latent internal state (e.g., intentions and aggressiveness). This research uses a simple model for human behavior with unknown parameters that make up the internal states of the traffic participants and presents a method for quantifying the value of estimating these states and planning with their uncertainty explicitly modeled. An upper performance bound is established by an omniscient Monte Carlo Tree Search (MCTS) planner that has perfect knowledge of the internal states. A baseline lower bound is established by planning with MCTS assuming that all drivers have the same internal state. MCTS variants are then used to solve a partially observable Markov decision process (POMDP) that models the internal state uncertainty to determine whether inferring the internal state offers an advantage over the baseline. Applying this method to a freeway lane changing scenario reveals that there is a significant performance gap between the upper bound and baseline. POMDP planning techniques come close to closing this gap, especially when important hidden model parameters are correlated with measurable parameters.