 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAVOID-JACK: Avoidance of Jackknifing for Swarms of Long Heavy Articulated Vehicles
Nov 11, 2025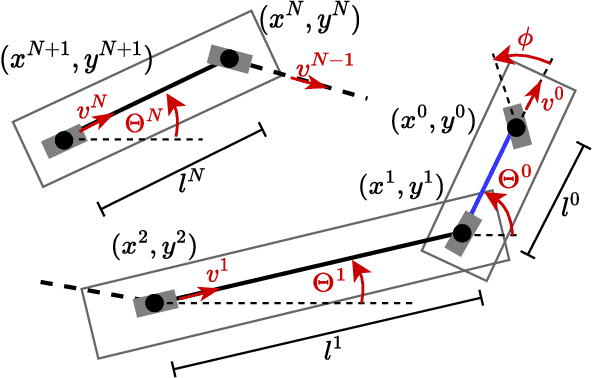
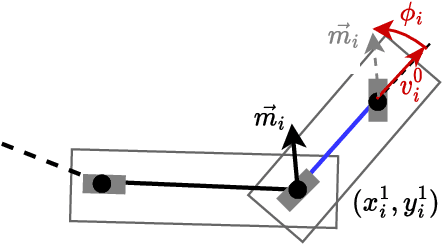
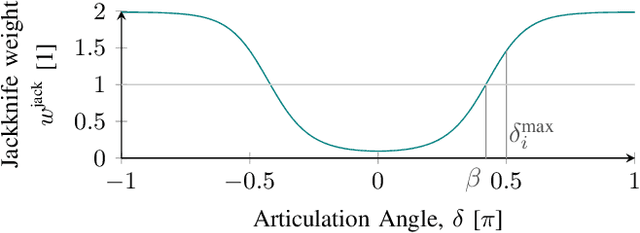
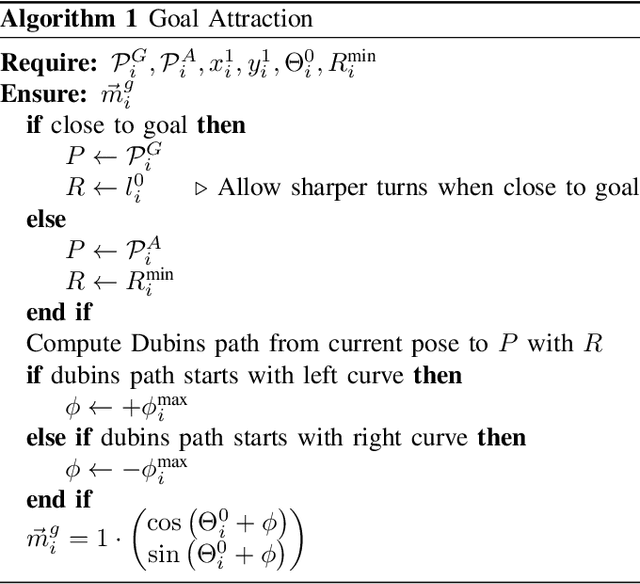
This paper presents a novel approach to avoiding jackknifing and mutual collisions in Heavy Articulated Vehicles (HAVs) by leveraging decentralized swarm intelligence. In contrast to typical swarm robotics research, our robots are elongated and exhibit complex kinematics, introducing unique challenges. Despite its relevance to real-world applications such as logistics automation, remote mining, airport baggage transport, and agricultural operations, this problem has not been addressed in the existing literature. To tackle this new class of swarm robotics problems, we propose a purely reaction-based, decentralized swarm intelligence strategy tailored to automate elongated, articulated vehicles. The method presented in this paper prioritizes jackknifing avoidance and establishes a foundation for mutual collision avoidance. We validate our approach through extensive simulation experiments and provide a comprehensive analysis of its performance. For the experiments with a single HAV, we observe that for 99.8% jackknifing was successfully avoided and that 86.7% and 83.4% reach their first and second goals, respectively. With two HAVs interacting, we observe 98.9%, 79.4%, and 65.1%, respectively, while 99.7% of the HAVs do not experience mutual collisions.
The Road to Learning Explainable Inverse Kinematic Models: Graph Neural Networks as Inductive Bias for Symbolic Regression
Jan 23, 2025This paper shows how a Graph Neural Network (GNN) can be used to learn an Inverse Kinematics (IK) based on an automatically generated dataset. The generated Inverse Kinematics is generalized to a family of manipulators with the same Degree of Freedom (DOF), but varying link length configurations. The results indicate a position error of less than 1.0 cm for 3 DOF and 4.5 cm for 5 DOF, and orientation error of 2$^\circ$ for 3 DOF and 8.2$^\circ$ for 6 DOF, which allows the deployment to certain real world-problems. However, out-of-domain errors and lack of extrapolation can be observed in the resulting GNN. An extensive analysis of these errors indicates potential for enhancement in the future. Consequently, the generated GNNs are tailored to be used in future work as an inductive bias to generate analytical equations through symbolic regression.
A Robot Localization Framework Using CNNs for Object Detection and Pose Estimation
Oct 03, 2018
External localization is an essential part for the indoor operation of small or cost-efficient robots, as they are used, for example, in swarm robotics. We introduce a two-stage localization and instance identification framework for arbitrary robots based on convolutional neural networks. Object detection is performed on an external camera image of the operation zone providing robot bounding boxes for an identification and orientation estimation convolutional neural network. Additionally, we propose a process to generate the necessary training data. The framework was evaluated with 3 different robot types and various identification patterns. We have analyzed the main framework hyperparameters providing recommendations for the framework operation settings. We achieved up to 98% mAP@IOU0.5 and only 1.6{\deg} orientation error, running with a frame rate of 50 Hz on a GPU.