 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Object Tracking: Integrating Modular Neural Networks into a Kalman Framework
Apr 03, 2025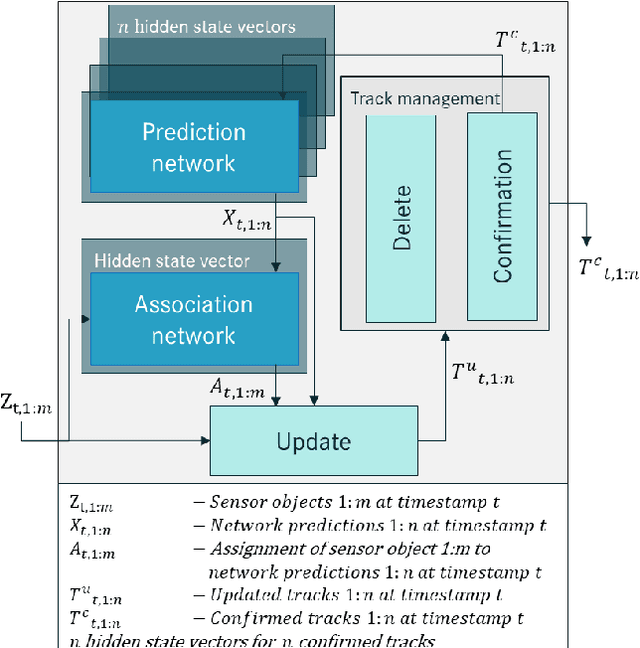
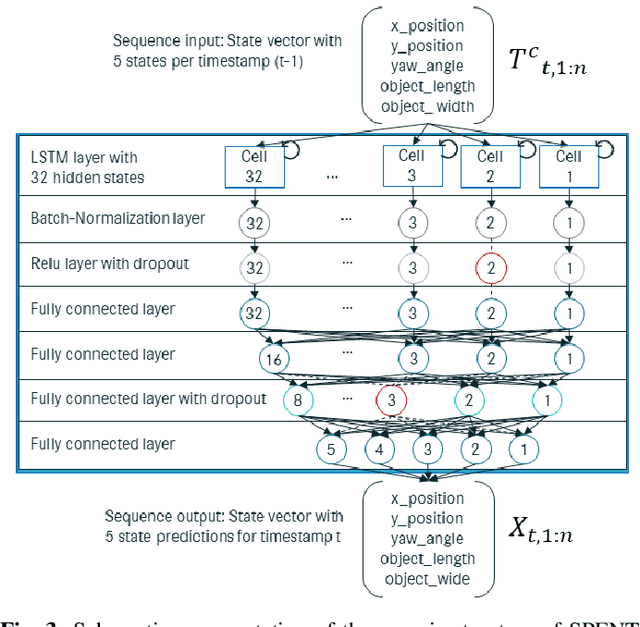
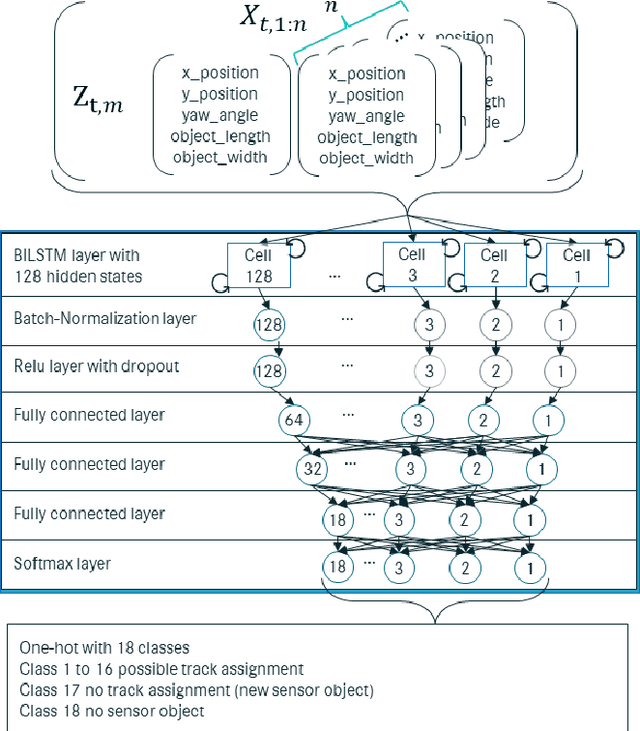
This paper presents novel Machine Learning (ML) methodologies for Multi-Object Tracking (MOT), specifically designed to meet the increasing complexity and precision demands of Advanced Driver Assistance Systems (ADAS). We introduce three Neural Network (NN) models that address key challenges in MOT: (i) the Single-Prediction Network (SPENT) for trajectory prediction, (ii) the Single-Association Network (SANT) for mapping individual Sensor Object (SO) to existing tracks, and (iii) the Multi-Association Network (MANTa) for associating multiple SOs to multiple tracks. These models are seamlessly integrated into a traditional Kalman Filter (KF) framework, maintaining the system's modularity by replacing relevant components without disrupting the overall architecture. Importantly, all three networks are designed to be run in a realtime, embedded environment. Each network contains less than 50k trainable parameters. Our evaluation, conducted on the public KITTI tracking dataset, demonstrates significant improvements in tracking performance. SPENT reduces the Root Mean Square Error (RMSE) by 50% compared to a standard KF, while SANT and MANTa achieve up to 95% accuracy in sensor object-to-track assignments. These results underscore the effectiveness of incorporating task-specific NNs into traditional tracking systems, boosting performance and robustness while preserving modularity, maintainability, and interpretability.