 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLyapunov-Based Deep Learning Control for Robots with Unknown Jacobian
Sep 05, 2025


Deep learning, with its exceptional learning capabilities and flexibility, has been widely applied in various applications. However, its black-box nature poses a significant challenge in real-time robotic applications, particularly in robot control, where trustworthiness and robustness are critical in ensuring safety. In robot motion control, it is essential to analyze and ensure system stability, necessitating the establishment of methodologies that address this need. This paper aims to develop a theoretical framework for end-to-end deep learning control that can be integrated into existing robot control theories. The proposed control algorithm leverages a modular learning approach to update the weights of all layers in real time, ensuring system stability based on Lyapunov-like analysis. Experimental results on industrial robots are presented to illustrate the performance of the proposed deep learning controller. The proposed method offers an effective solution to the black-box problem in deep learning, demonstrating the possibility of deploying real-time deep learning strategies for robot kinematic control in a stable manner. This achievement provides a critical foundation for future advancements in deep learning based real-time robotic applications.
An Analytic End-to-End Deep Learning Algorithm based on Collaborative Learning
May 31, 2023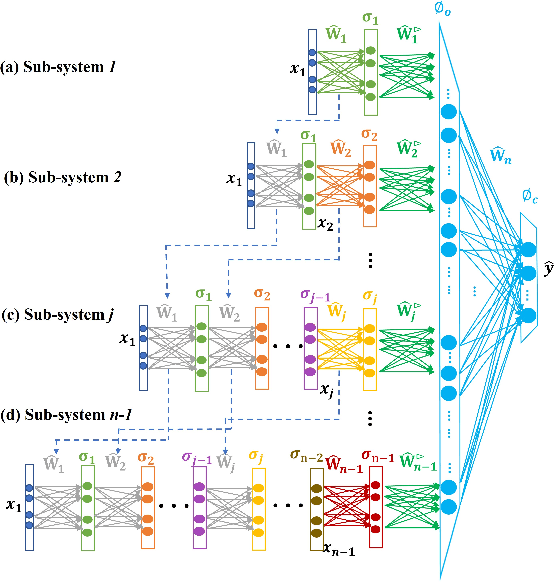
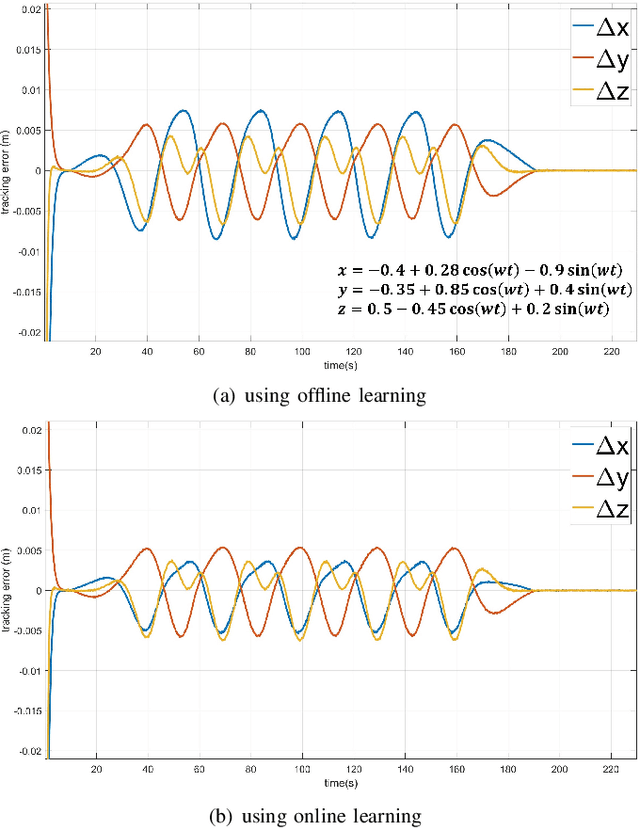
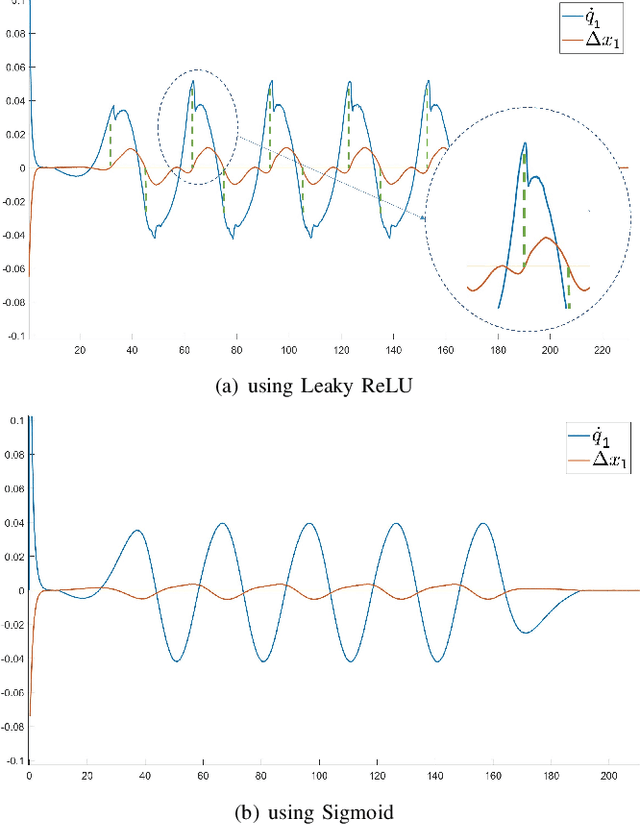
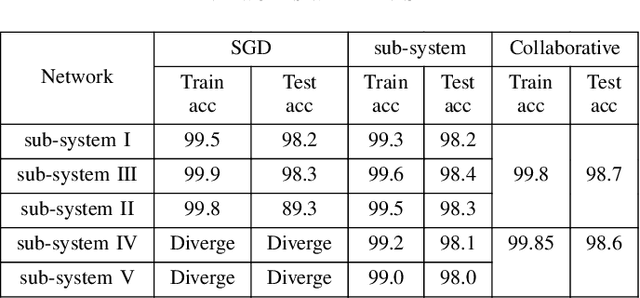
In most control applications, theoretical analysis of the systems is crucial in ensuring stability or convergence, so as to ensure safe and reliable operations and also to gain a better understanding of the systems for further developments. However, most current deep learning methods are black-box approaches that are more focused on empirical studies. Recently, some results have been obtained for convergence analysis of end-to end deep learning based on non-smooth ReLU activation functions, which may result in chattering for control tasks. This paper presents a convergence analysis for end-to-end deep learning of fully connected neural networks (FNN) with smooth activation functions. The proposed method therefore avoids any potential chattering problem, and it also does not easily lead to gradient vanishing problems. The proposed End-to-End algorithm trains multiple two-layer fully connected networks concurrently and collaborative learning can be used to further combine their strengths to improve accuracy. A classification case study based on fully connected networks and MNIST dataset was done to demonstrate the performance of the proposed approach. Then an online kinematics control task of a UR5e robot arm was performed to illustrate the regression approximation and online updating ability of our algorithm.
An Analytic Layer-wise Deep Learning Framework with Applications to Robotics
Feb 07, 2021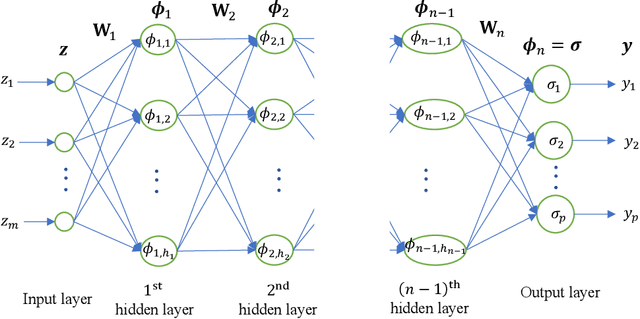

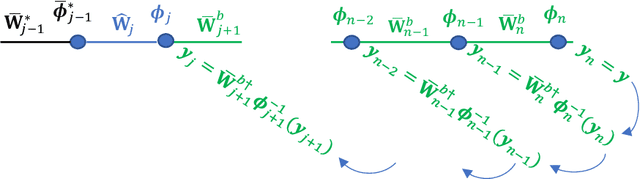
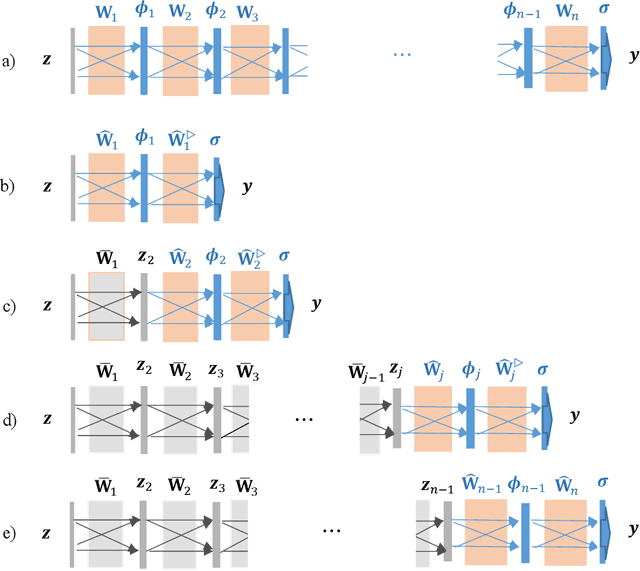
Deep learning has achieved great success in many applications, but it has been less well analyzed from the theoretical perspective. To deploy deep learning algorithms in a predictable and stable manner is particularly important in robotics, as robots are active agents that need to interact safely with the physical world. This paper presents an analytic deep learning framework for fully connected neural networks, which can be applied for both regression problems and classification problems. Examples for regression and classification problems include online robot control and robot vision. We present two layer-wise learning algorithms such that the convergence of the learning systems can be analyzed. Firstly, an inverse layer-wise learning algorithm for multilayer networks with convergence analysis for each layer is presented to understand the problems of layer-wise deep learning. Secondly, a forward progressive learning algorithm where the deep networks are built progressively by using single hidden layer networks is developed to achieve better accuracy. It is shown that the progressive learning method can be used for fine-tuning of weights from convergence point of view. The effectiveness of the proposed framework is illustrated based on classical benchmark recognition tasks using the MNIST and CIFAR-10 datasets and the results show a good balance between performance and explainability. The proposed method is subsequently applied for online learning of robot kinematics and experimental results on kinematic control of UR5e robot with unknown model are presented.