 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Recharging and Flight Mission Planning for Battery-operated Autonomous Drones
Sep 12, 2017
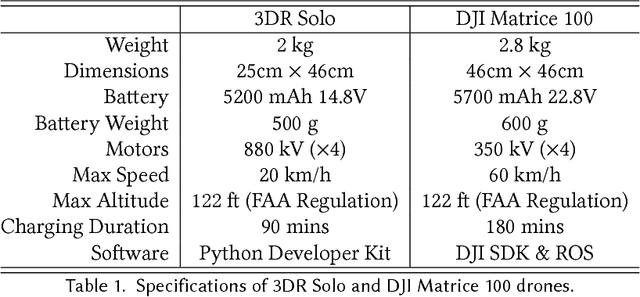
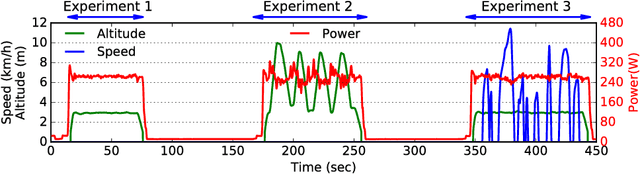
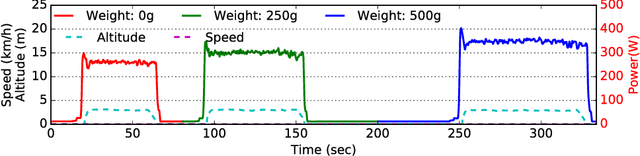
Autonomous drones (also known as unmanned aerial vehicles) are increasingly popular for diverse applications of light-weight delivery and as substitutions of manned operations in remote locations. The computing systems for drones are becoming a new venue for research in cyber-physical systems. Autonomous drones require integrated intelligent decision systems to control and manage their flight missions in the absence of human operators. One of the most crucial aspects of drone mission control and management is related to the optimization of battery lifetime. Typical drones are powered by on-board batteries, with limited capacity. But drones are expected to carry out long missions. Thus, a fully automated management system that can optimize the operations of battery-operated autonomous drones to extend their operation time is highly desirable. This paper presents several contributions to automated management systems for battery-operated drones: (1) We conduct empirical studies to model the battery performance of drones, considering various flight scenarios. (2) We study a joint problem of flight mission planning and recharging optimization for drones with an objective to complete a tour mission for a set of sites of interest in the shortest time. This problem captures diverse applications of delivery and remote operations by drones. (3) We present algorithms for solving the problem of flight mission planning and recharging optimization. We implemented our algorithms in a drone management system, which supports real-time flight path tracking and re-computation in dynamic environments. We evaluated the results of our algorithms using data from empirical studies. (4) To allow fully autonomous recharging of drones, we also develop a robotic charging system prototype that can recharge drones autonomously by our drone management system.