 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Evaluating the Effectiveness of the HoneyBot: A Case Study
May 28, 2019
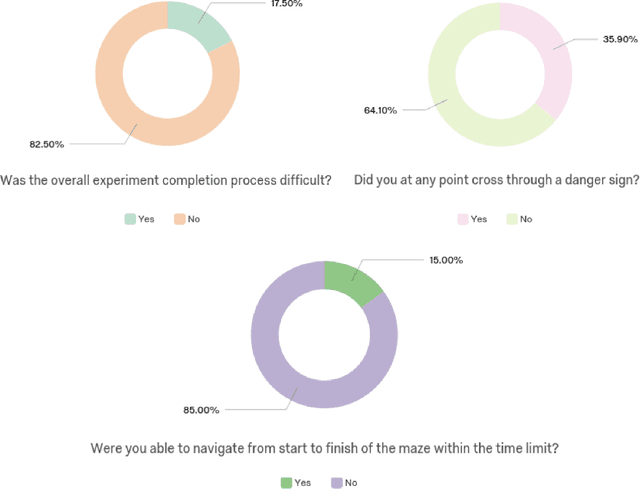
In recent years, cyber-physical system (CPS) security as applied to robotic systems has become a popular research area. Mainly because robotics systems have traditionally emphasized the completion of a specific objective and lack security oriented design. Our previous work, HoneyBot \cite{celine}, presented the concept and prototype of the first software hybrid interaction honeypot specifically designed for networked robotic systems. The intuition behind HoneyBot was that it would be a remotely accessible robotic system that could simulate unsafe actions and physically perform safe actions to fool attackers. Unassuming attackers would think they were connected to an ordinary robotic system, believing their exploits were being successfully executed. All the while, the HoneyBot is logging all communications and exploits sent to be used for attacker attribution and threat model creation. In this paper, we present findings from the result of a user study performed to evaluate the effectiveness of the HoneyBot framework and architecture as it applies to real robotic systems. The user study consisted of 40 participants, was conducted over the course of several weeks, and drew from a wide range of participants aged between 18-60 with varying level of technical expertise. From the study we found that research subjects could not tell the difference between the simulated sensor values and the real sensor values coming from the HoneyBot, meaning the HoneyBot convincingly spoofed communications.