 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Reinforcement Learning for Virtual Character Animation Control
Apr 13, 2021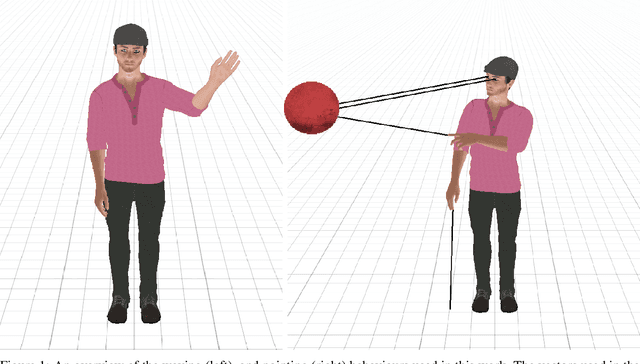
Virtual character animation control is a problem for which Reinforcement Learning (RL) is a viable approach. While current work have applied RL effectively to portray physics-based skills, social behaviours are challenging to design reward functions for, due to their lack of physical interaction with the world. On the other hand, data-driven implementations for these skills have been limited to supervised learning methods which require extensive training data and carry constraints on generalisability. In this paper, we propose RLAnimate, a novel data-driven deep RL approach to address this challenge, where we combine the strengths of RL together with an ability to learn from a motion dataset when creating agents. We formalise a mathematical structure for training agents by refining the conceptual roles of elements such as agents, environments, states and actions, in a way that leverages attributes of the character animation domain and model-based RL. An agent trained using our approach learns versatile animation dynamics to portray multiple behaviours, using an iterative RL training process, which becomes aware of valid behaviours via representations learnt from motion capture clips. We demonstrate, by training agents that portray realistic pointing and waving behaviours, that our approach requires a significantly lower training time, and substantially fewer sample episodes to be generated during training relative to state-of-the-art physics-based RL methods. Also, compared to existing supervised learning-based animation agents, RLAnimate needs a limited dataset of motion clips to generate representations of valid behaviours during training.