 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Paradigm-based Brain-Computer Interface for Robotic Arm Control
Dec 14, 2022Brain-computer interface (BCI) uses brain signals to communicate with external devices without actual control. Particularly, BCI is one of the interfaces for controlling the robotic arm. In this study, we propose a knowledge distillation-based framework to manipulate robotic arm through hybrid paradigm induced EEG signals for practical use. The teacher model is designed to decode input data hierarchically and transfer knowledge to student model. To this end, soft labels and distillation loss functions are applied to the student model training. According to experimental results, student model achieved the best performance among the singular architecture-based methods. It is confirmed that using hierarchical models and knowledge distillation, the performance of a simple architecture can be improved. Since it is uncertain what knowledge is transferred, it is important to clarify this part in future studies.
A Factorization Approach for Motor Imagery Classification
Dec 13, 2021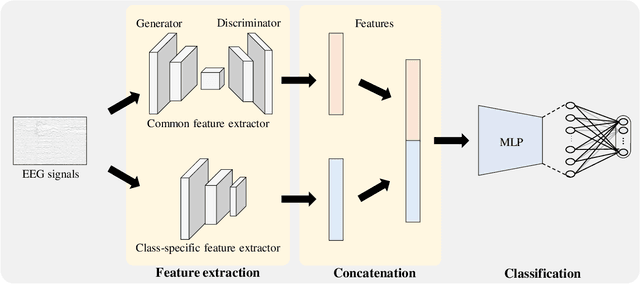
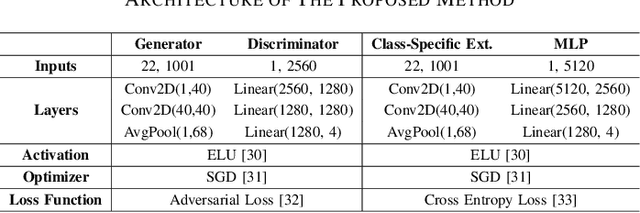
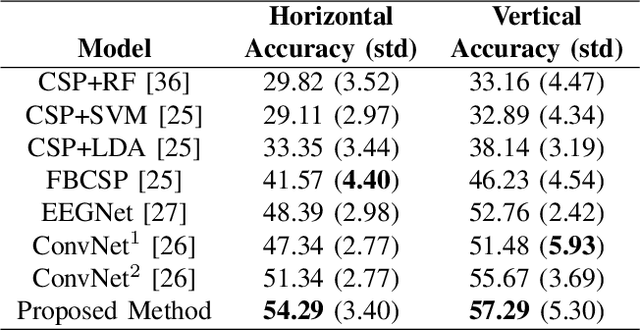
Brain-computer interface uses brain signals to communicate with external devices without actual control. Many studies have been conducted to classify motor imagery based on machine learning. However, classifying imagery data with sparse spatial characteristics, such as single-arm motor imagery, remains a challenge. In this paper, we proposed a method to factorize EEG signals into two groups to classify motor imagery even if spatial features are sparse. Based on adversarial learning, we focused on extracting common features of EEG signals which are robust to noise and extracting only signal features. In addition, class-specific features were extracted which are specialized for class classification. Finally, the proposed method classifies the classes by representing the features of the two groups as one embedding space. Through experiments, we confirmed the feasibility that extracting features into two groups is advantageous for datasets that contain sparse spatial features.