 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Stream of Search: Learning to Better Search with Language Models via Optimal Path Guidance
Oct 03, 2024While language models have demonstrated impressive capabilities across a range of tasks, they still struggle with tasks that require complex planning and reasoning. Recent studies have proposed training language models on search processes rather than optimal solutions, resulting in better generalization performance even though search processes are noisy and even suboptimal. However, these studies overlook the value of optimal solutions, which can serve as step-by-step landmarks to guide more effective search. In this work, we explore how to leverage optimal solutions to enhance the search and planning abilities of language models. To this end, we propose guided stream of search (GSoS), which seamlessly incorporates optimal solutions into the self-generation process in a progressive manner, producing high-quality search trajectories. These trajectories are then distilled into the pre-trained model via supervised fine-tuning. Our approach significantly enhances the search and planning abilities of language models on Countdown, a simple yet challenging mathematical reasoning task. Notably, combining our method with RL fine-tuning yields further improvements, whereas previous supervised fine-tuning methods do not benefit from RL. Furthermore, our approach exhibits greater effectiveness than leveraging optimal solutions in the form of subgoal rewards.
Discovering Hierarchical Achievements in Reinforcement Learning via Contrastive Learning
Jul 07, 2023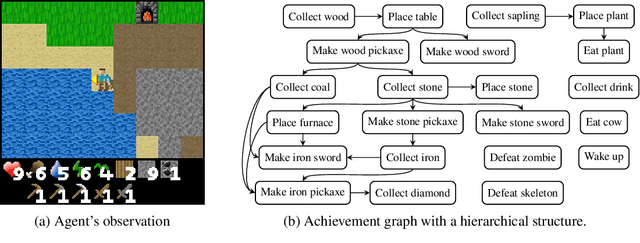
Discovering achievements with a hierarchical structure on procedurally generated environments poses a significant challenge. This requires agents to possess a broad range of abilities, including generalization and long-term reasoning. Many prior methods are built upon model-based or hierarchical approaches, with the belief that an explicit module for long-term planning would be beneficial for learning hierarchical achievements. However, these methods require an excessive amount of environment interactions or large model sizes, limiting their practicality. In this work, we identify that proximal policy optimization (PPO), a simple and versatile model-free algorithm, outperforms the prior methods with recent implementation practices. Moreover, we find that the PPO agent can predict the next achievement to be unlocked to some extent, though with low confidence. Based on this observation, we propose a novel contrastive learning method, called achievement distillation, that strengthens the agent's capability to predict the next achievement. Our method exhibits a strong capacity for discovering hierarchical achievements and shows state-of-the-art performance on the challenging Crafter environment using fewer model parameters in a sample-efficient regime.