 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrADyS-SIM -- A OMNET++/INET simulation framework for Internet of Flying things
Feb 16, 2022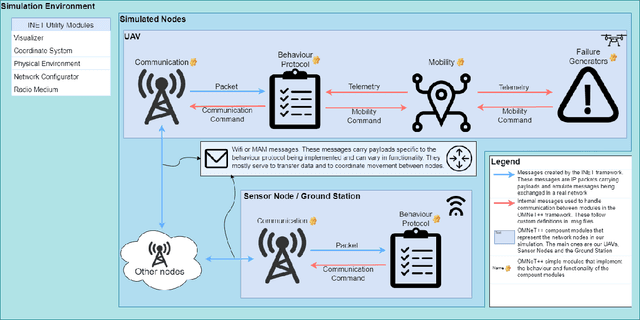
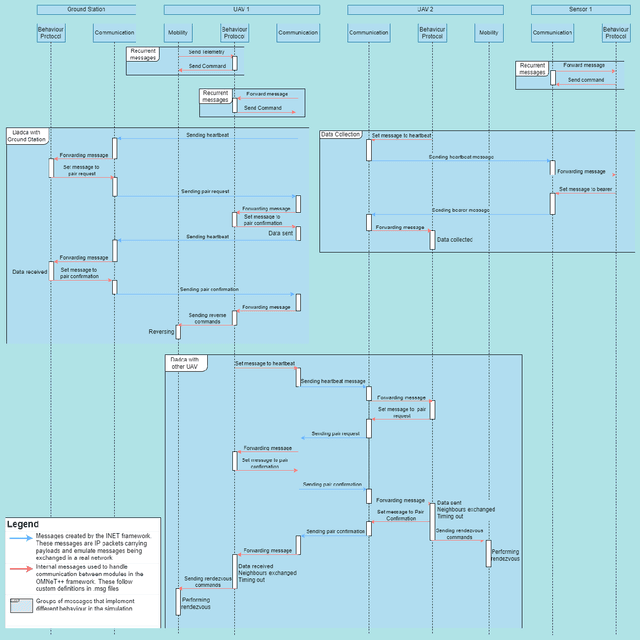
This technical report describes GrADyS-SIM, a framework for simulating cooperating swarms of UAVs in joint mission in hypothetical landscape and communicating through RF radios. The framework was created to aid and verify the communication, coordination and context-awareness protocols being developed in the GrADyS project. GrADyS-SIM uses the OMNeT++ simulation library and its INET model suite and and allows for addition of modified or customized versions of some simulated components, network configurations and vehicle coordination, so that new coordination protocols can be developed and tested through the framework. The framework simulates UAV movement dictated by file containing some MAVLink instructions and affected on the fly by different network situations. The UAV swarm coordination protocol emerges from individual interactions between UAVs and has the objective of optimizing the collection of sensor data over an area. It also allows for the simulation of some types of failures to test the protocol adaptability. Every node in the simulation is highly configurable making testing different network opographies, coordination protocols, node hardware configurations and more a quick task.