 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Inference of Spacecraft Pose using Particle Filtering
Jun 26, 2019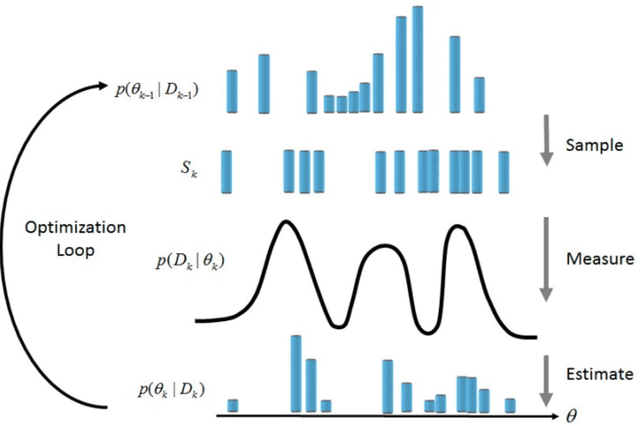
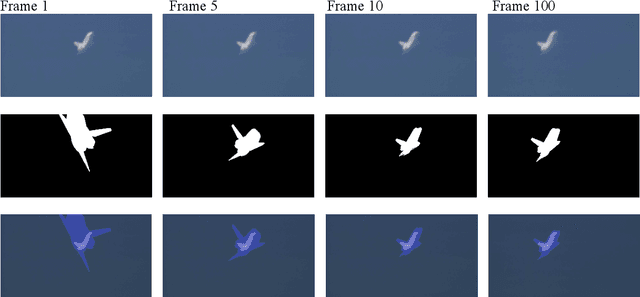
Automated 3D pose estimation of satellites and other known space objects is a critical component of space situational awareness. Ground-based imagery offers a convenient data source for satellite characterization; however, analysis algorithms must contend with atmospheric distortion, variable lighting, and unknown reflectance properties. Traditional feature-based pose estimation approaches are unable to discover an accurate correlation between a known 3D model and imagery given this challenging image environment. This paper presents an innovative method for automated 3D pose estimation of known space objects in the absence of satisfactory texture. The proposed approach fits the silhouette of a known satellite model to ground-based imagery via particle filtering. Each particle contains enough information (orientation, position, scale, model articulation) to generate an accurate object silhouette. The silhouette of individual particles is compared to an observed image. Comparison is done probabilistically by calculating the joint probability that pixels inside the silhouette belong to the foreground distribution and that pixels outside the silhouette belong to the background distribution. Both foreground and background distributions are computed by observing empty space. The population of particles are resampled at each new image observation, with the probability of a particle being resampled proportional to how the particle's silhouette matches the observation image. The resampling process maintains multiple pose estimates which is beneficial in preventing and escaping local minimums. Experiments were conducted on both commercial imagery and on LEO satellite imagery. Imagery from the commercial experiments are shown in this paper.