 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutOTranS: an Autonomous Open World Transportation System
Oct 08, 2018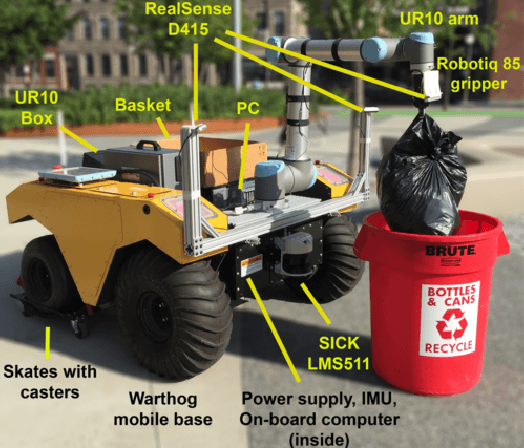



Tasks in outdoor open world environments are now ripe for automation with mobile manipulators. The dynamic, unstructured and unknown environments associated with such tasks -- a prime example would be collecting roadside trash -- makes them particularly challenging. In this paper we present an approach to solving the problem of picking up, transporting, and dropping off novel objects outdoors. Our solution integrates a navigation system, a grasp detection and planning system, and a custom task planner. We perform experiments that demonstrate that the system can be used to transport a wide class of novel objects (trash bags, general garbage, gardening tools and fruits) in unstructured settings outdoors with a relatively high end-to-end success rate of 85%. See it at work at: https://youtu.be/93nWXhaGEWA
Non-Matrix Tactile Sensors: How Can Be Exploited Their Local Connectivity For Predicting Grasp Stability?
Sep 14, 2018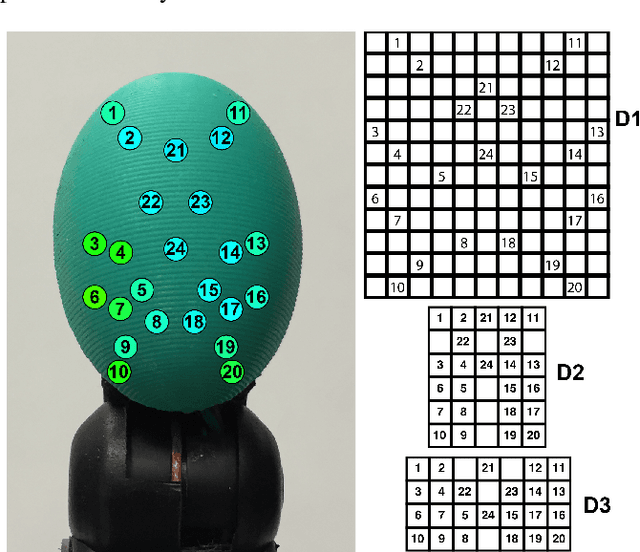
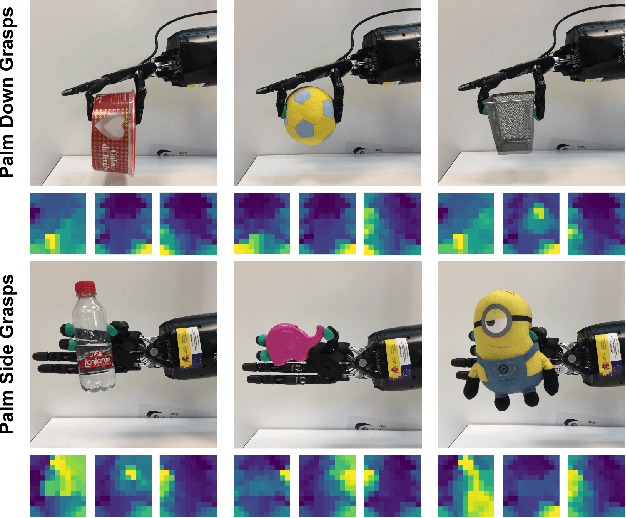
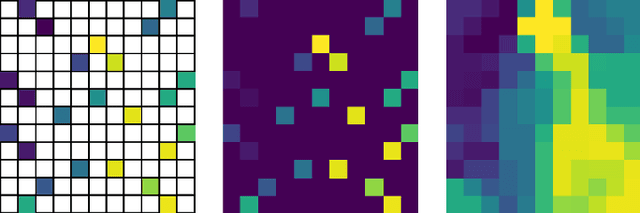
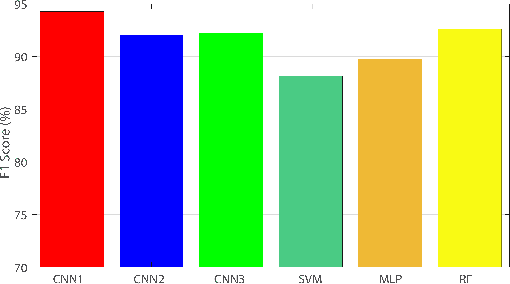
Tactile sensors supply useful information during the interaction with an object that can be used for assessing the stability of a grasp. Most of the previous works on this topic processed tactile readings as signals by calculating hand-picked features. Some of them have processed these readings as images calculating characteristics on matrix-like sensors. In this work, we explore how non-matrix sensors (sensors with taxels not arranged exactly in a matrix) can be processed as tactile images as well. In addition, we prove that they can be used for predicting grasp stability by training a Convolutional Neural Network (CNN) with them. We captured over 2500 real three-fingered grasps on 41 everyday objects to train a CNN that exploited the local connectivity inherent on the non-matrix tactile sensors, achieving 94.2% F1-score on predicting stability.