 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArray Partitioning Based Near-Field Attitude and Location Estimation
Apr 23, 2025This paper studies a passive source localization system, where a single base station (BS) is employed to estimate the positions and attitudes of multiple mobile stations (MSs). The BS and the MSs are equipped with uniform rectangular arrays, and the MSs are located in the near-field region of the BS array. To avoid the difficulty of tackling the problem directly based on the near-field signal model, we establish a subarray-wise far-field received signal model. In this model, the entire BS array is divided into multiple subarrays to ensure that each MS is in the far-field region of each BS subarray. By exploiting the angles of arrival (AoAs) of an MS antenna at different BS subarrays, we formulate the attitude and location estimation problem under the Bayesian inference framework. Based on the factor graph representation of the probabilistic problem model, a message passing algorithm named array partitioning based pose and location estimation (APPLE) is developed to solve this problem. An estimation-error lower bound is obtained as a performance benchmark of the proposed algorithm. Numerical results demonstrate that the proposed APPLE algorithm outperforms other baseline methods in the accuracy of position and attitude estimation.
Scalable Near-Field Localization Based on Array Partitioning and Angle-of-Arrival Fusion
Dec 19, 2023



Existing near-field localization algorithms generally face a scalability issue when the number of antennas at the sensor array goes large. To address this issue, this paper studies a passive localization system, where an extremely large-scale antenna array (ELAA) is deployed at the base station (BS) to locate a user that transmits signals. The user is considered to be in the near-field (Fresnel) region of the BS array. We propose a novel algorithm, named array partitioning based location estimation (APLE), for scalable near-field localization. The APLE algorithm is developed based on the basic assumption that, by partitioning the ELAA into multiple subarrays, the user can be approximated as in the far-field region of each subarray. The APLE algorithm determines the user's location by exploiting the differences in the angles of arrival (AoAs) of the subarrays. Specifically, we establish a probability model of the received signal based on the geometric constraints of the user's location and the observed AoAs. Then, a message-passing algorithm, i.e., the proposed APLE algorithm, is designed for user localization. APLE exhibits linear computational complexity with the number of BS antennas, leading to a significant reduction in complexity compared to the existing methods. Besides, numerical results demonstrate that the proposed APLE algorithm outperforms the existing baselines in terms of localization accuracy.
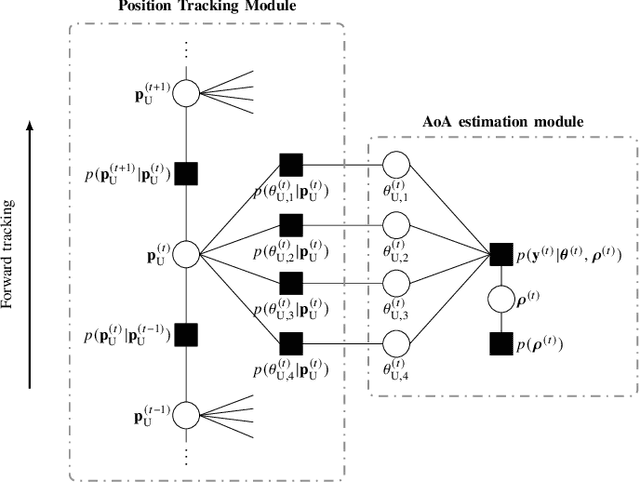
Variational Bayesian Multiuser Tracking for Reconfigurable Intelligent Surface Aided MIMO-OFDM Systems
Apr 24, 2023Reconfigurable intelligent surface (RIS) has attracted enormous interest for its potential advantages in assisting both wireless communication and environmental sensing. In this paper, we study a challenging multiuser tracking problem in the multiple-input multiple-output (MIMO) orthogonal frequency division multiplexing (OFDM) system aided by multiple RISs. In particular, we assume that a multi-antenna base station (BS) receives the OFDM symbols from single-antenna users reflected by multiple RISs and tracks the positions of these users. Considering the users' mobility and the blockage of light-of-sight (LoS) paths, we establish a probability transition model to characterize the tracking process, where the geometric constraints between channel parameters and multiuser positions are utilized. We further develop an online message passing algorithm, termed the Bayesian multiuser tracking (BMT) algorithm, to estimate the multiuser positions, the angles-of-arrivals (AoAs) at multiple RISs, and the time delay and the blockage of the LoS path. The Bayesian Cramer Rao bound (BCRB) is derived as the fundamental performance limit of the considered tracking problem. Based on the BCRB, we optimize the passive beamforming (PBF) of the multiple RISs to improve the tracking performance. Simulation results show that the proposed PBF design significantly outperforms the counterpart schemes, and our BMT algorithm can achieve up to centimeter-level tracking accuracy.
Bayesian User Localization and Tracking for Reconfigurable Intelligent Surface Aided MIMO Systems
Dec 09, 2021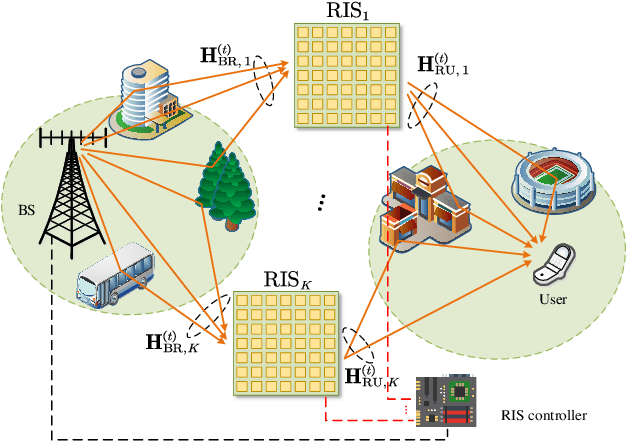
In this paper, we study the user localization and tracking problem in the reconfigurable intelligent surface (RIS) aided multiple-input multiple-output (MIMO) system, where a multi-antenna base station (BS) and multiple RISs are deployed to assist the localization and tracking of a multi-antenna user. By establishing a probability transition model for user mobility, we develop a message-passing algorithm, termed the Bayesian user localization and tracking (BULT) algorithm, to estimate and track the user position and the angle-of-arrival (AoAs) at the user in an online fashion. We also derive Bayesian Cram\'er Rao bound (BCRB) to characterize the fundamental performance limit of the considered tracking problem. To improve the tracking performance, we optimize the beamforming design at the BS and the RISs to minimize the derived BCRB. Simulation results show that our BULT algorithm can perform close to the derived BCRB, and significantly outperforms the counterpart algorithms without exploiting the temporal correlation of the user location.