 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelective Attention System (SAS): Device-Addressed Speech Detection for Real-Time On-Device Voice AI
Apr 09, 2026We study device-addressed speech detection under pre-ASR edge deployment constraints, where systems must decide whether to forward audio before transcription under strict latency and compute limits. We show that, in multi-speaker environments with temporally ambiguous utterances, this task is more effectively modelled as a sequential routing problem over interaction history than as an utterance-local classification task. We formalize this as Sequential Device-Addressed Routing (SDAR) and present the Selective Attention System (SAS), an on-device implementation that instantiates this formulation. On a held-out 60-hour multi-speaker English test set, the primary audio-only configuration achieves F1=0.86 (precision=0.89, recall=0.83); with an optional camera, audio+video fusion raises F1 to 0.95 (precision=0.97, recall=0.93). Removing causal interaction history (Stage~3) reduced F1 from 0.95 to 0.57+/-0.03 in the audio+video configuration under our evaluation protocol. Among the tested components, this was the largest observed ablation effect, indicating that short-horizon interaction history carries substantial decision-relevant information in the evaluated setting. SAS runs fully on-device on ARM Cortex-A class hardware (<150 ms latency, <20 MB footprint). All results are from internal evaluation on a proprietary dataset evaluated primarily in English; a 5-hour evaluation subset may be shared for independent verification (Section 8.8).
Synthesizing Skeletal Motion and Physiological Signals as a Function of a Virtual Human's Actions and Emotions
Feb 15, 2021



Round-the-clock monitoring of human behavior and emotions is required in many healthcare applications which is very expensive but can be automated using machine learning (ML) and sensor technologies. Unfortunately, the lack of infrastructure for collection and sharing of such data is a bottleneck for ML research applied to healthcare. Our goal is to circumvent this bottleneck by simulating a human body in virtual environment. This will allow generation of potentially infinite amounts of shareable data from an individual as a function of his actions, interactions and emotions in a care facility or at home, with no risk of confidentiality breach or privacy invasion. In this paper, we develop for the first time a system consisting of computational models for synchronously synthesizing skeletal motion, electrocardiogram, blood pressure, respiration, and skin conductance signals as a function of an open-ended set of actions and emotions. Our experimental evaluations, involving user studies, benchmark datasets and comparison to findings in the literature, show that our models can generate skeletal motion and physiological signals with high fidelity. The proposed framework is modular and allows the flexibility to experiment with different models. In addition to facilitating ML research for round-the-clock monitoring at a reduced cost, the proposed framework will allow reusability of code and data, and may be used as a training tool for ML practitioners and healthcare professionals.
String Tightening as a Self-Organizing Phenomenon: Computation of Shortest Homotopic Path, Smooth Path, and Convex Hull
Dec 11, 2020



The phenomenon of self-organization has been of special interest to the neural network community for decades. In this paper, we study a variant of the Self-Organizing Map (SOM) that models the phenomenon of self-organization of the particles forming a string when the string is tightened from one or both ends. The proposed variant, called the String Tightening Self-Organizing Neural Network (STON), can be used to solve certain practical problems, such as computation of shortest homotopic paths, smoothing paths to avoid sharp turns, and computation of convex hull. These problems are of considerable interest in computational geometry, robotics path planning, AI (diagrammatic reasoning), VLSI routing, and geographical information systems. Given a set of obstacles and a string with two fixed terminal points in a two dimensional space, the STON model continuously tightens the given string until the unique shortest configuration in terms of the Euclidean metric is reached. The STON minimizes the total length of a string on convergence by dynamically creating and selecting feature vectors in a competitive manner. Proof of correctness of this anytime algorithm and experimental results obtained by its deployment are presented in the paper.
A Constraint Satisfaction Framework for Executing Perceptions and Actions in Diagrammatic Reasoning
Jan 16, 2014

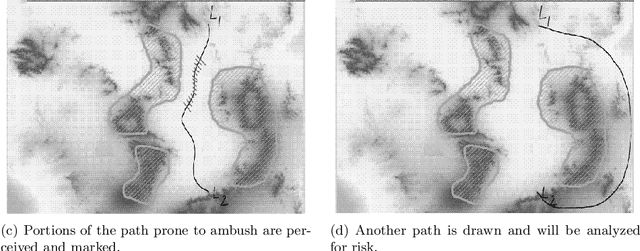
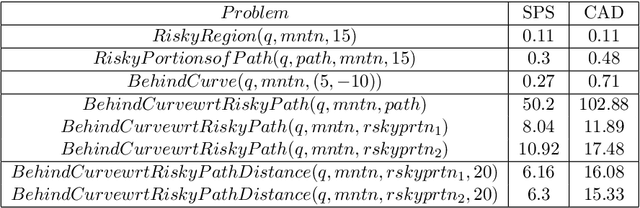
Diagrammatic reasoning (DR) is pervasive in human problem solving as a powerful adjunct to symbolic reasoning based on language-like representations. The research reported in this paper is a contribution to building a general purpose DR system as an extension to a SOAR-like problem solving architecture. The work is in a framework in which DR is modeled as a process where subtasks are solved, as appropriate, either by inference from symbolic representations or by interaction with a diagram, i.e., perceiving specified information from a diagram or modifying/creating objects in a diagram in specified ways according to problem solving needs. The perceptions and actions in most DR systems built so far are hand-coded for the specific application, even when the rest of the system is built using the general architecture. The absence of a general framework for executing perceptions/actions poses as a major hindrance to using them opportunistically -- the essence of open-ended search in problem solving. Our goal is to develop a framework for executing a wide variety of specified perceptions and actions across tasks/domains without human intervention. We observe that the domain/task-specific visual perceptions/actions can be transformed into domain/task-independent spatial problems. We specify a spatial problem as a quantified constraint satisfaction problem in the real domain using an open-ended vocabulary of properties, relations and actions involving three kinds of diagrammatic objects -- points, curves, regions. Solving a spatial problem from this specification requires computing the equivalent simplified quantifier-free expression, the complexity of which is inherently doubly exponential. We represent objects as configuration of simple elements to facilitate decomposition of complex problems into simpler and similar subproblems. We show that, if the symbolic solution to a subproblem can be expressed concisely, quantifiers can be eliminated from spatial problems in low-order polynomial time using similar previously solved subproblems. This requires determining the similarity of two problems, the existence of a mapping between them computable in polynomial time, and designing a memory for storing previously solved problems so as to facilitate search. The efficacy of the idea is shown by time complexity analysis. We demonstrate the proposed approach by executing perceptions and actions involved in DR tasks in two army applications.
Learning Features and their Transformations by Spatial and Temporal Spherical Clustering
Aug 10, 2013

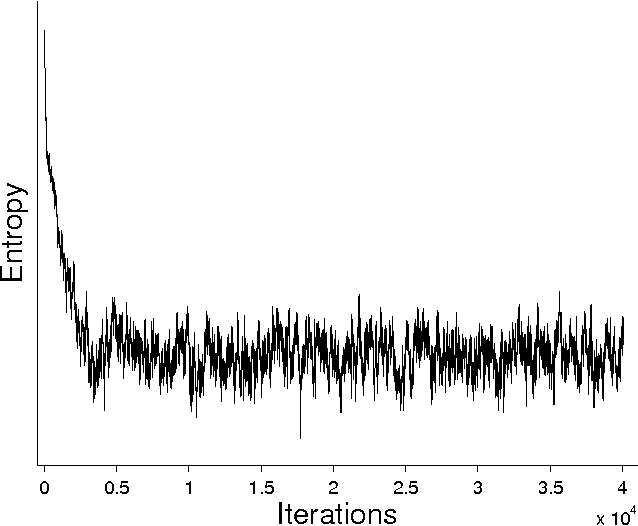
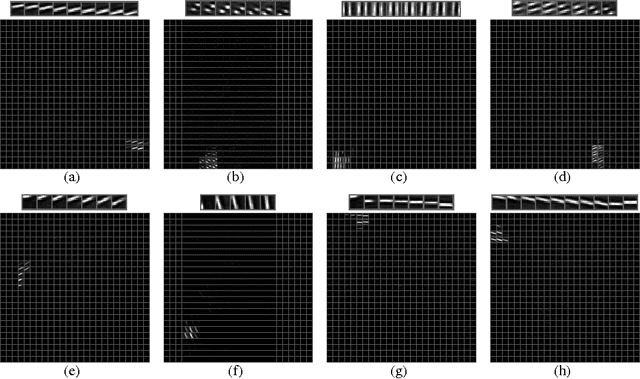
Learning features invariant to arbitrary transformations in the data is a requirement for any recognition system, biological or artificial. It is now widely accepted that simple cells in the primary visual cortex respond to features while the complex cells respond to features invariant to different transformations. We present a novel two-layered feedforward neural model that learns features in the first layer by spatial spherical clustering and invariance to transformations in the second layer by temporal spherical clustering. Learning occurs in an online and unsupervised manner following the Hebbian rule. When exposed to natural videos acquired by a camera mounted on a cat's head, the first and second layer neurons in our model develop simple and complex cell-like receptive field properties. The model can predict by learning lateral connections among the first layer neurons. A topographic map to their spatial features emerges by exponentially decaying the flow of activation with distance from one neuron to another in the first layer that fire in close temporal proximity, thereby minimizing the pooling length in an online manner simultaneously with feature learning.