 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttributed Graph Clustering with Multi-Scale Weight-Based Pairwise Coarsening and Contrastive Learning
Jul 28, 2025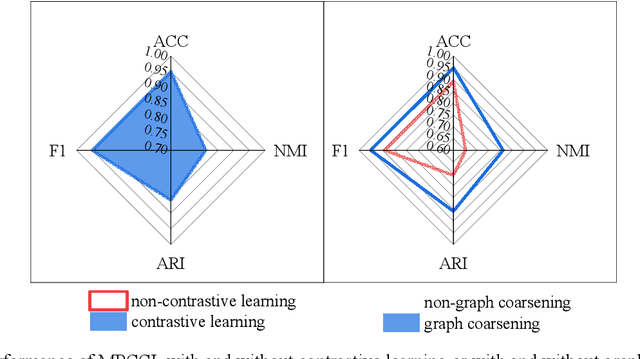
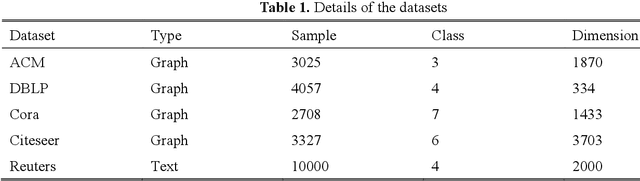
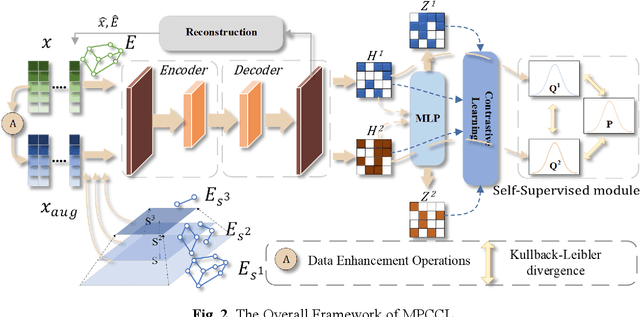
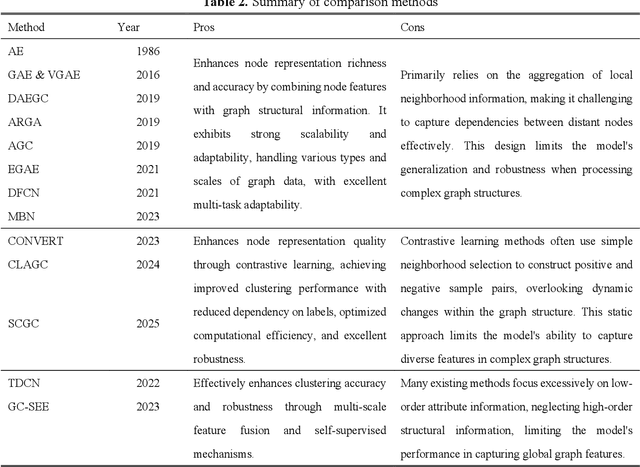
This study introduces the Multi-Scale Weight-Based Pairwise Coarsening and Contrastive Learning (MPCCL) model, a novel approach for attributed graph clustering that effectively bridges critical gaps in existing methods, including long-range dependency, feature collapse, and information loss. Traditional methods often struggle to capture high-order graph features due to their reliance on low-order attribute information, while contrastive learning techniques face limitations in feature diversity by overemphasizing local neighborhood structures. Similarly, conventional graph coarsening methods, though reducing graph scale, frequently lose fine-grained structural details. MPCCL addresses these challenges through an innovative multi-scale coarsening strategy, which progressively condenses the graph while prioritizing the merging of key edges based on global node similarity to preserve essential structural information. It further introduces a one-to-many contrastive learning paradigm, integrating node embeddings with augmented graph views and cluster centroids to enhance feature diversity, while mitigating feature masking issues caused by the accumulation of high-frequency node weights during multi-scale coarsening. By incorporating a graph reconstruction loss and KL divergence into its self-supervised learning framework, MPCCL ensures cross-scale consistency of node representations. Experimental evaluations reveal that MPCCL achieves a significant improvement in clustering performance, including a remarkable 15.24% increase in NMI on the ACM dataset and notable robust gains on smaller-scale datasets such as Citeseer, Cora and DBLP.
* The source code for this study is available at https://github.com/YF-W/MPCCL
BM2CP: Efficient Collaborative Perception with LiDAR-Camera Modalities
Oct 23, 2023Collaborative perception enables agents to share complementary perceptual information with nearby agents. This would improve the perception performance and alleviate the issues of single-view perception, such as occlusion and sparsity. Most existing approaches mainly focus on single modality (especially LiDAR), and not fully exploit the superiority of multi-modal perception. We propose a collaborative perception paradigm, BM2CP, which employs LiDAR and camera to achieve efficient multi-modal perception. It utilizes LiDAR-guided modal fusion, cooperative depth generation and modality-guided intermediate fusion to acquire deep interactions among modalities of different agents, Moreover, it is capable to cope with the special case where one of the sensors, same or different type, of any agent is missing. Extensive experiments validate that our approach outperforms the state-of-the-art methods with 50X lower communication volumes in both simulated and real-world autonomous driving scenarios. Our code is available at https://github.com/byzhaoAI/BM2CP.