 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEngineering deep learning methods on automatic detection of damage in infrastructure due to extreme events
May 01, 2022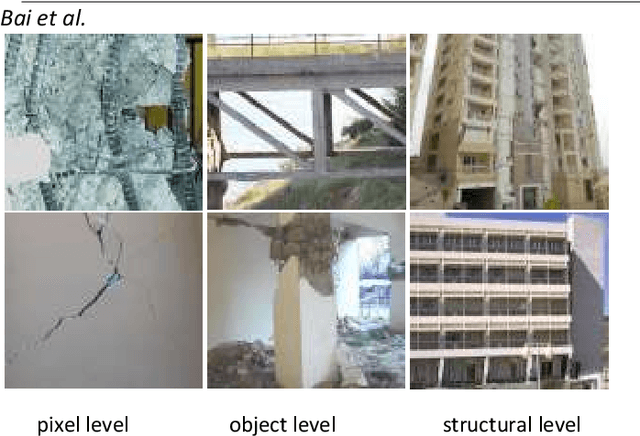

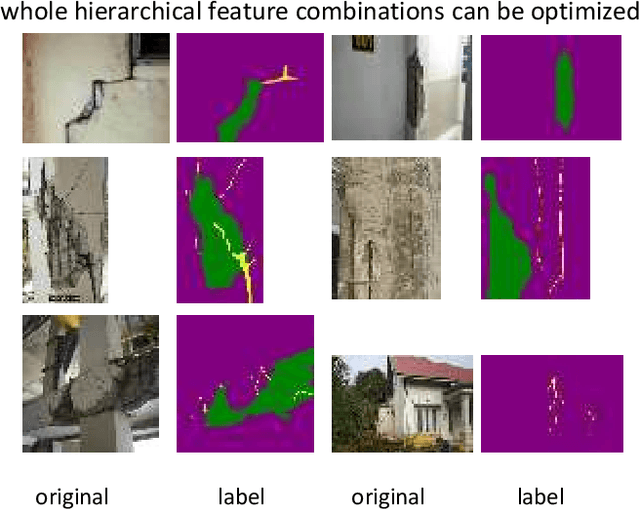
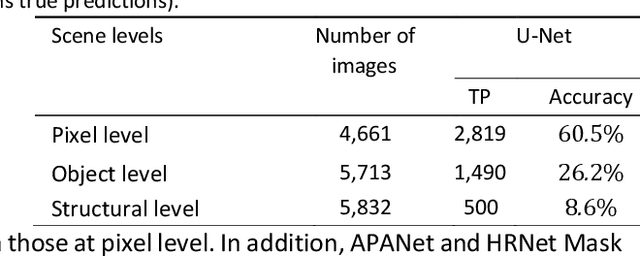
This paper presents a few comprehensive experimental studies for automated Structural Damage Detection (SDD) in extreme events using deep learning methods for processing 2D images. In the first study, a 152-layer Residual network (ResNet) is utilized to classify multiple classes in eight SDD tasks, which include identification of scene levels, damage levels, material types, etc. The proposed ResNet achieved high accuracy for each task while the positions of the damage are not identifiable. In the second study, the existing ResNet and a segmentation network (U-Net) are combined into a new pipeline, cascaded networks, for categorizing and locating structural damage. The results show that the accuracy of damage detection is significantly improved compared to only using a segmentation network. In the third and fourth studies, end-to-end networks are developed and tested as a new solution to directly detect cracks and spalling in the image collections of recent large earthquakes. One of the proposed networks can achieve an accuracy above 67.6% for all tested images at various scales and resolutions, and shows its robustness for these human-free detection tasks. As a preliminary field study, we applied the proposed method to detect damage in a concrete structure that was tested to study its progressive collapse performance. The experiments indicate that these solutions for automatic detection of structural damage using deep learning methods are feasible and promising. The training datasets and codes will be made available for the public upon the publication of this paper.
Deep Transformer Networks for Time Series Classification: The NPP Safety Case
Apr 18, 2021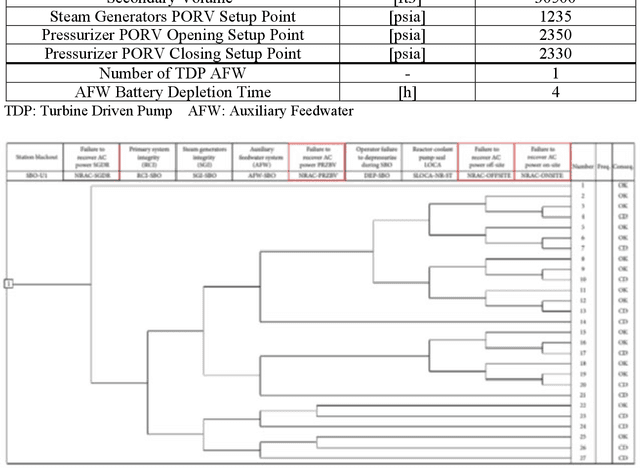

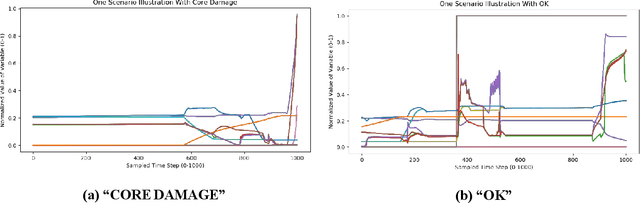
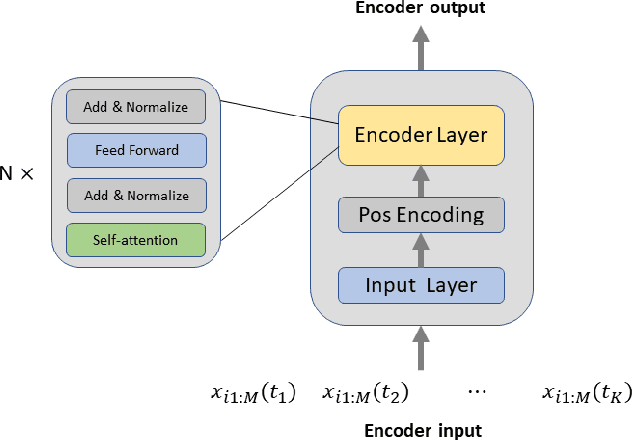
A challenging part of dynamic probabilistic risk assessment for nuclear power plants is the need for large amounts of temporal simulations given various initiating events and branching conditions from which representative feature extraction becomes complicated for subsequent applications. Artificial Intelligence techniques have been shown to be powerful tools in time-dependent sequential data processing to automatically extract and yield complex features from large data. An advanced temporal neural network referred to as the Transformer is used within a supervised learning fashion to model the time-dependent NPP simulation data and to infer whether a given sequence of events leads to core damage or not. The training and testing datasets for the Transformer are obtained by running 10,000 RELAP5-3D NPP blackout simulations with the list of variables obtained from the RAVEN software. Each simulation is classified as "OK" or "CORE DAMAGE" based on the consequence. The results show that the Transformer can learn the characteristics of the sequential data and yield promising performance with approximately 99% classification accuracy on the testing dataset.
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories
Oct 13, 2020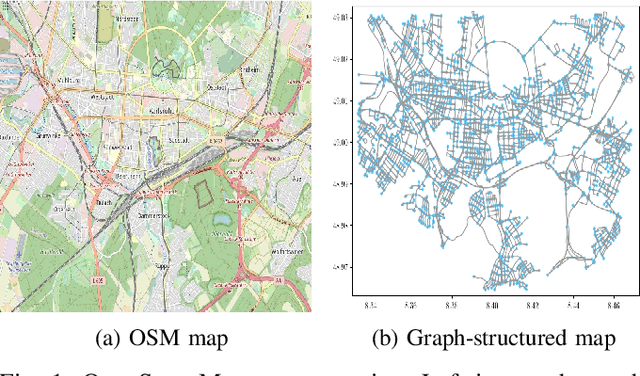
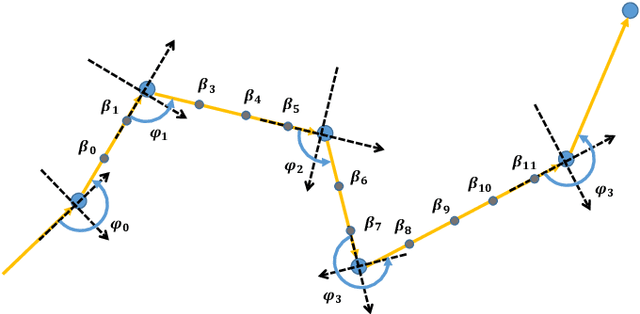
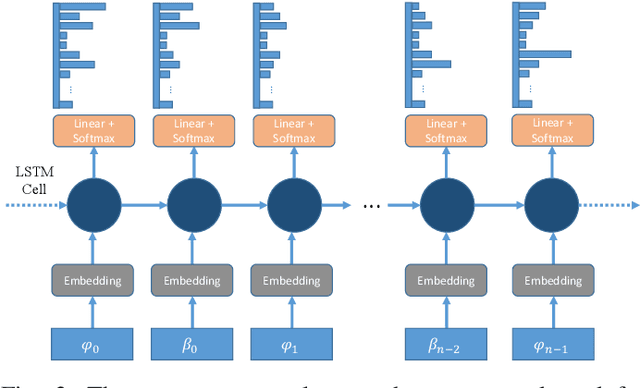
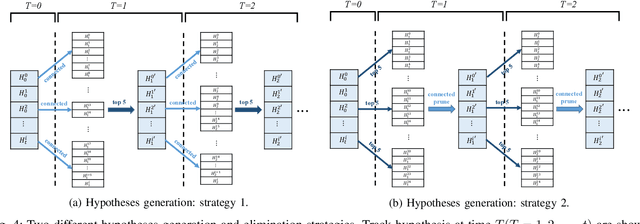
In this paper, we propose a novel trajectory learning method that exploits motion trajectories on topological map using recurrent neural network for temporally consistent geolocalization of object. Inspired by human's ability to both be aware of distance and direction of self-motion in navigation, our trajectory learning method learns a pattern representation of trajectories encoded as a sequence of distances and turning angles to assist self-localization. We pose the learning process as a conditional sequence prediction problem in which each output locates the object on a traversable path in a map. Considering the prediction sequence ought to be topologically connected in the graph-structured map, we adopt two different hypotheses generation and elimination strategies to eliminate disconnected sequence prediction. We demonstrate our approach on the KITTI stereo visual odometry dataset which is a city-scale environment and can generate trajectory with metric information. The key benefits of our approach to geolocalization are that 1) we take advantage of powerful sequence modeling ability of recurrent neural network and its robustness to noisy input, 2) only require a map in the form of a graph and simply use an affordable sensor that generates motion trajectory and 3) do not need initial position. The experiments show that the motion trajectories can be learned by training an recurrent neural network, and temporally consistent geolocation can be predicted with both of the proposed strategies.