 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Selection of Perception Models for Robotic Control
Jul 13, 2022



Robotic perception models, such as Deep Neural Networks (DNNs), are becoming more computationally intensive and there are several models being trained with accuracy and latency trade-offs. However, modern latency accuracy trade-offs largely report mean accuracy for single-step vision tasks, but there is little work showing which model to invoke for multi-step control tasks in robotics. The key challenge in a multi-step decision making is to make use of the right models at right times to accomplish the given task. That is, the accomplishment of the task with a minimum control cost and minimum perception time is a desideratum; this is known as the model selection problem. In this work, we precisely address this problem of invoking the correct sequence of perception models for multi-step control. In other words, we provide a provably optimal solution to the model selection problem by casting it as a multi-objective optimization problem balancing the control cost and perception time. The key insight obtained from our solution is how the variance of the perception models matters (not just the mean accuracy) for multi-step decision making, and to show how to use diverse perception models as a primitive for energy-efficient robotics. Further, we demonstrate our approach on a photo-realistic drone landing simulation using visual navigation in AirSim. Using our proposed policy, we achieved 38.04% lower control cost with 79.1% less perception time than other competing benchmarks.
Interpretable Trade-offs Between Robot Task Accuracy and Compute Efficiency
Aug 03, 2021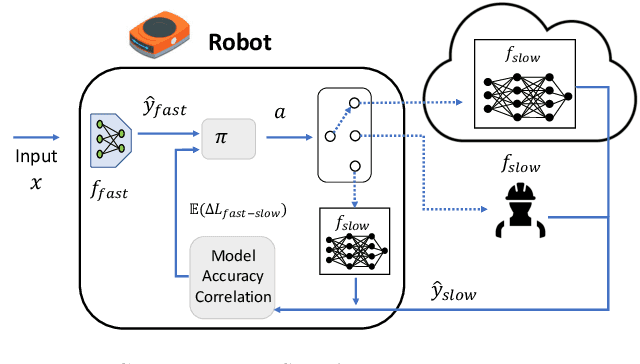
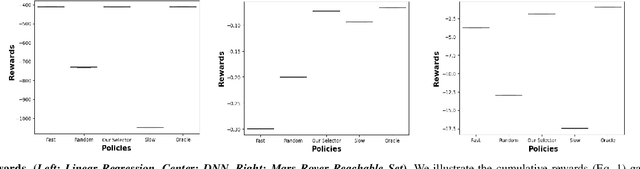
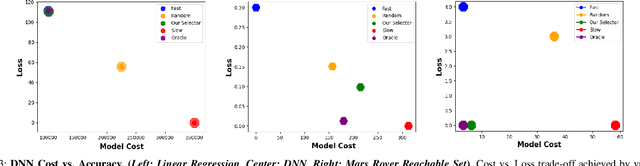
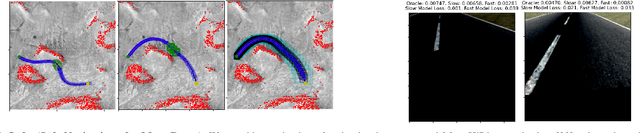
A robot can invoke heterogeneous computation resources such as CPUs, cloud GPU servers, or even human computation for achieving a high-level goal. The problem of invoking an appropriate computation model so that it will successfully complete a task while keeping its compute and energy costs within a budget is called a model selection problem. In this paper, we present an optimal solution to the model selection problem with two compute models, the first being fast but less accurate, and the second being slow but more accurate. The main insight behind our solution is that a robot should invoke the slower compute model only when the benefits from the gain in accuracy outweigh the computational costs. We show that such cost-benefit analysis can be performed by leveraging the statistical correlation between the accuracy of fast and slow compute models. We demonstrate the broad applicability of our approach to diverse problems such as perception using neural networks and safe navigation of a simulated Mars rover.