 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Learning via Simultaneous Generating and Learning
Oct 21, 2019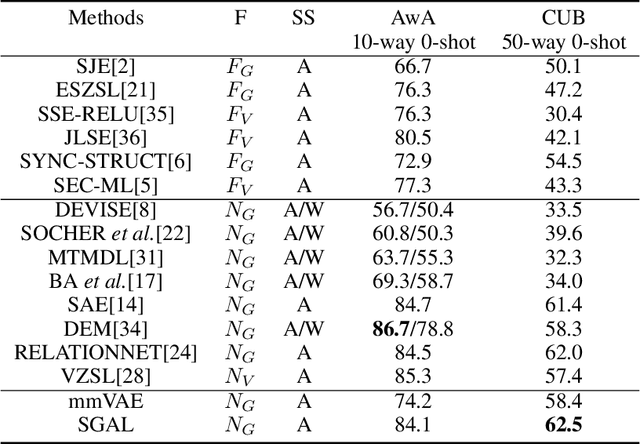
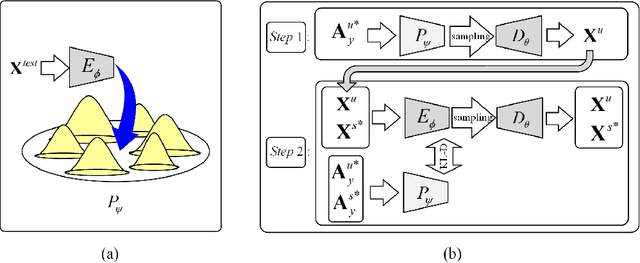
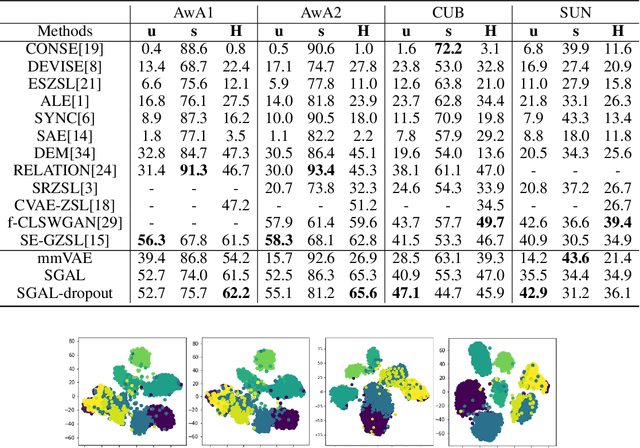
To overcome the absence of training data for unseen classes, conventional zero-shot learning approaches mainly train their model on seen datapoints and leverage the semantic descriptions for both seen and unseen classes. Beyond exploiting relations between classes of seen and unseen, we present a deep generative model to provide the model with experience about both seen and unseen classes. Based on the variational auto-encoder with class-specific multi-modal prior, the proposed method learns the conditional distribution of seen and unseen classes. In order to circumvent the need for samples of unseen classes, we treat the non-existing data as missing examples. That is, our network aims to find optimal unseen datapoints and model parameters, by iteratively following the generating and learning strategy. Since we obtain the conditional generative model for both seen and unseen classes, classification as well as generation can be performed directly without any off-the-shell classifiers. In experimental results, we demonstrate that the proposed generating and learning strategy makes the model achieve the outperforming results compared to that trained only on the seen classes, and also to the several state-of-the-art methods.
Not Only Look But Observe: Variational Observation Model of Scene-Level 3D Multi-Object Understanding for Probabilistic SLAM
Jul 23, 2019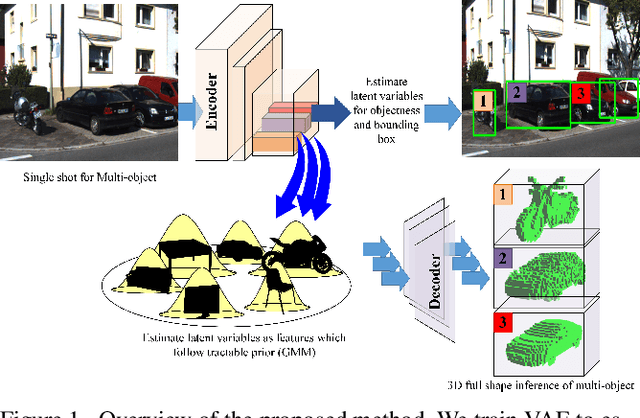

We present NOLBO, a variational observation model estimation for 3D multi-object from 2D single shot. Previous probabilistic instance-level understandings mainly consider the single-object image, not single shot with multi-object; relations between objects and the entire scene are out of their focus. The objectness of each observation also hardly join their model. Therefore, we propose a method to approximate the Bayesian observation model of scene-level 3D multi-object understanding. By exploiting variational auto-encoder (VAE), we estimate latent variables from the entire scene, which follow tractable distributions and concurrently imply 3D full shape and pose. To perform object-oriented data association and probabilistic simultaneous localization and mapping (SLAM), our observation models can easily be adopted to probabilistic inference by replacing object-oriented features with latent variables.