 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Robot Navigation with Adaptive Proxemics Based on Emotions
Feb 02, 2024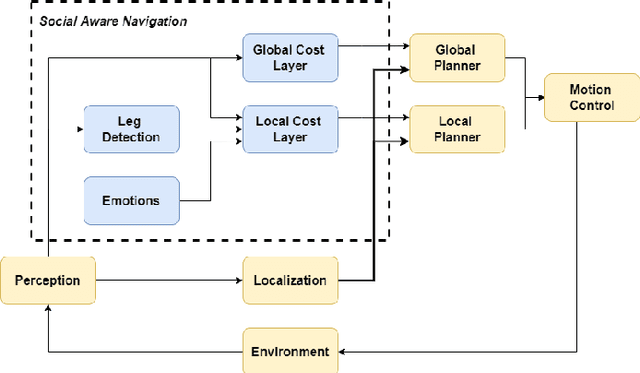
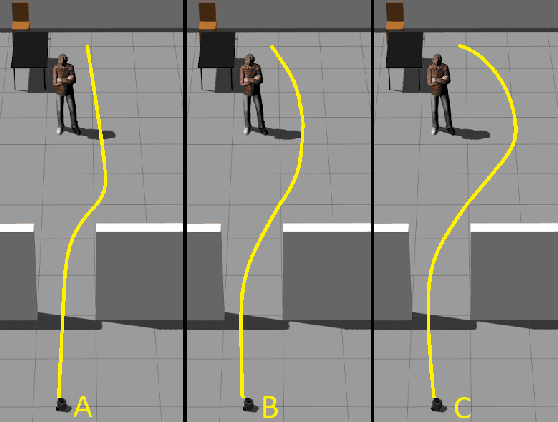
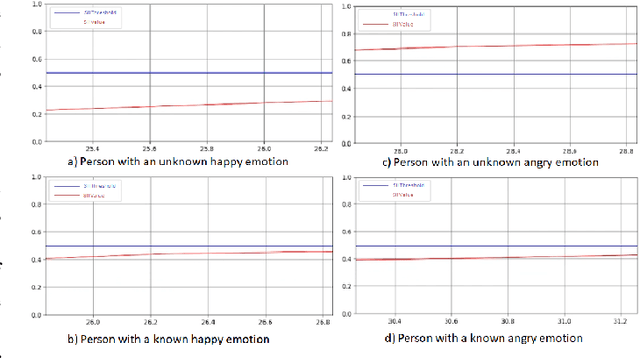
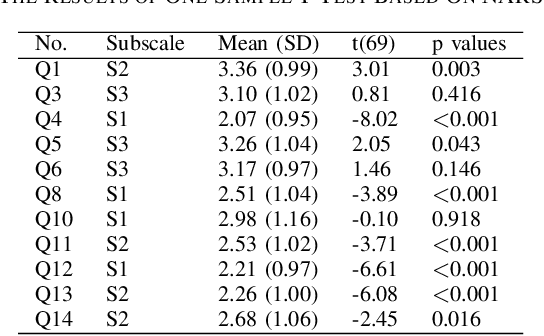
The primary aim of this paper is to investigate the integration of emotions into the social navigation framework to analyse its effect on both navigation and human physiological safety and comfort. The proposed framework uses leg detection to find the whereabouts of people and computes adaptive proxemic zones based on their emotional state. We designed several case studies in a simulated environment and examined 3 different emotions; positive (happy), neutral and negative (angry). A survey study was conducted with 70 participants to explore their impressions about the navigation of the robot and compare the human safety and comfort measurements results. Both survey and simulation results showed that integrating emotions into proxemic zones has a significant effect on the physical safety of a human. The results revealed that when a person is angry, the robot is expected to navigate further than the standard distance to support his/her physiological comfort and safety. The results also showed that reducing the navigation distance is not preferred when a person is happy.