 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancement of Neural Inertial Regression Networks: A Data-Driven Perspective
Jan 02, 2025



Inertial sensors are integral components in numerous applications, powering crucial features in robotics and our daily lives. In recent years, deep learning has significantly advanced inertial sensing performance and robustness. Deep-learning techniques are used in different domains and platforms to enhance network performance, but no common benchmark is available. The latter is critical for fair comparison and evaluation in a standardized framework as well as development in the field. To fill this gap, we define and thoroughly analyze 13 data-driven techniques for improving neural inertial regression networks. A focus is placed on three aspects of neural networks: network architecture, data augmentation, and data preprocessing. Extensive experiments were made across six diverse datasets that were collected from various platforms including quadrotors, doors, pedestrians, and mobile robots. In total, over 1079 minutes of inertial data sampled between 120-200Hz were analyzed. Our results demonstrate that data augmentation through rotation and noise addition consistently yields the most significant improvements. Moreover, this study outlines benchmarking strategies for enhancing neural inertial regression networks.
Snake-Inspired Mobile Robot Positioning with Hybrid Learning
Nov 26, 2024Mobile robots are used in various fields, from deliveries to search and rescue applications. Different types of sensors are mounted on the robot to provide accurate navigation and, thus, allow successful completion of its task. In real-world scenarios, due to environmental constraints, the robot frequently relies only on its inertial sensors. Therefore, due to noises and other error terms associated with the inertial readings, the navigation solution drifts in time. To mitigate the inertial solution drift, we propose the MoRPINet framework consisting of a neural network to regress the robot's travelled distance. To this end, we require the mobile robot to maneuver in a snake-like slithering motion to encourage nonlinear behavior. MoRPINet was evaluated using a dataset of 290 minutes of inertial recordings during field experiments and showed an improvement of 33\% in the positioning error over other state-of-the-art methods for pure inertial navigation.
MoRPI: Mobile Robot Pure Inertial Navigation
Jul 06, 2022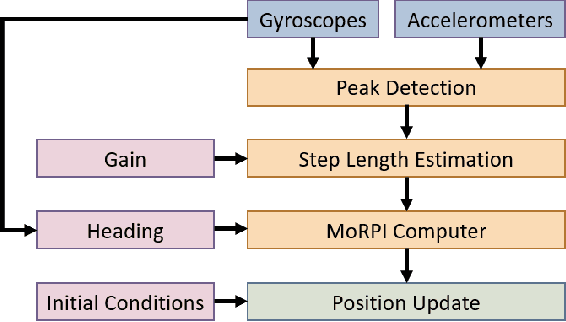
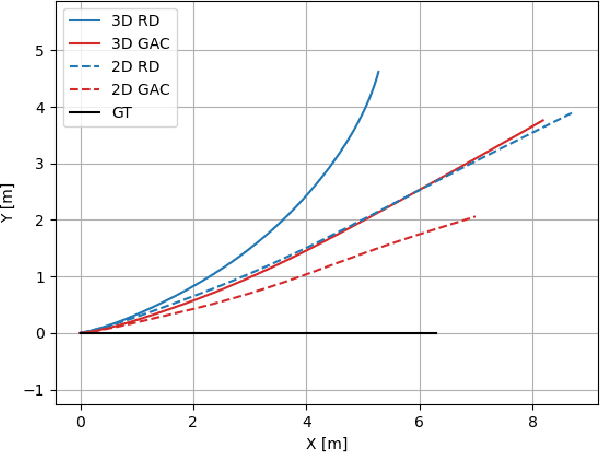
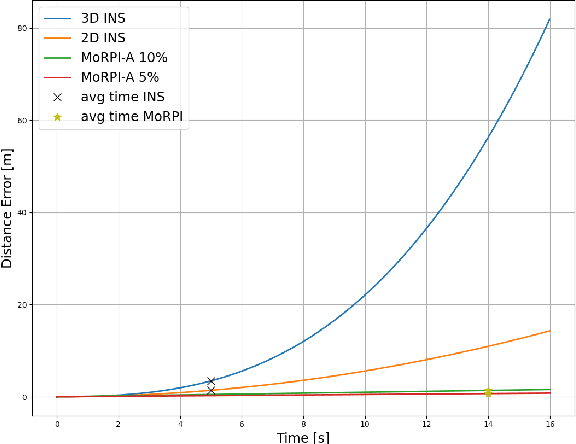

Mobile robots are used in industrial, leisure, and military applications. In some situations, a robot navigation solution relies only on inertial sensors and as a consequence, the navigation solution drifts in time. In this paper, we propose the MoRPI framework, a mobile robot pure inertial approach. Instead of travelling in a straight line trajectory, the robot moves in a periodic motion trajectory to enable peak-to-peak estimation. In this manner, instead of performing three integrations to calculate the robot position in a classical inertial solution, an empirical formula is used to estimate the travelled distance. Two types of MoRPI approaches are suggested, where one is based on both accelerometer and gyroscope readings while the other is only on gyroscopes. Closed form analytical solutions are derived to show that MoRPI produces lower position error compared to the classical pure inertial solution. In addition, to evaluate the proposed approach, field experiments were made with a mobile robot equipped with two types of inertial sensors. In total, 143 trajectories with a time duration of 75 minutes were collected and evaluated. The results show the benefits of using our approach. To facilitate further development of the proposed approach, both dataset and code are publicly available at https://github.com/ansfl/MoRPI.