Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeePose: Let's Make EfficientPose More Generally Applicable
Nov 30, 2021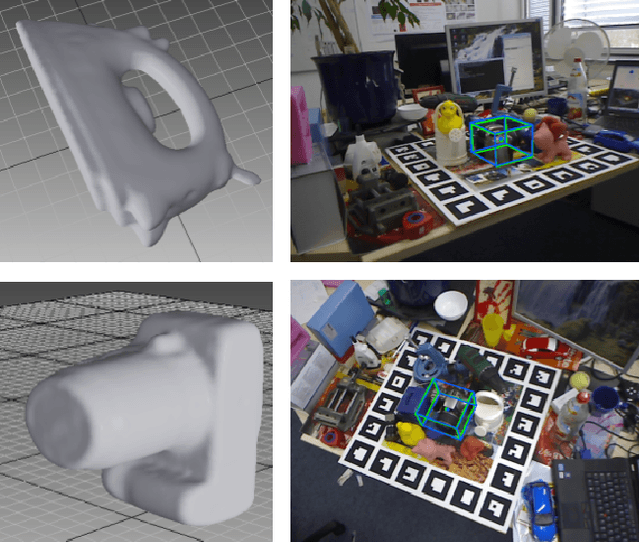
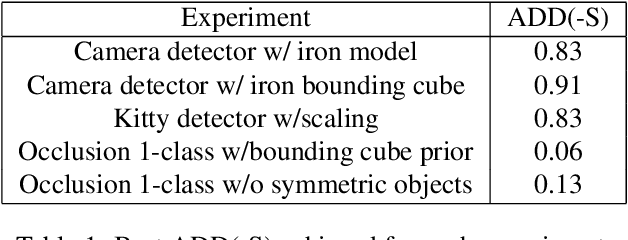
EfficientPose is an impressive 3D object detection model. It has been demonstrated to be quick, scalable, and accurate, especially when considering that it uses only RGB inputs. In this paper we try to improve on EfficientPose by giving it the ability to infer an object's size, and by simplifying both the data collection and loss calculations. We evaluated ePose using the Linemod dataset and a new subset of it called "Occlusion 1-class". We also outline our current progress and thoughts about using ePose with the NuScenes and the 2017 KITTI 3D Object Detection datasets. The source code is available at https://github.com/tbd-clip/EfficientPose.
* 7 pages, 8 figures
Via