 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Re-Planning and Adaptive Parameter Update for Multi-Agent Path Finding with Stochastic Travel Times
Feb 03, 2023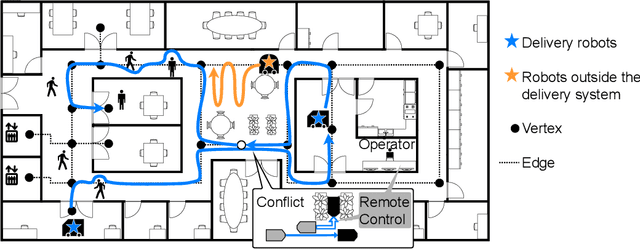
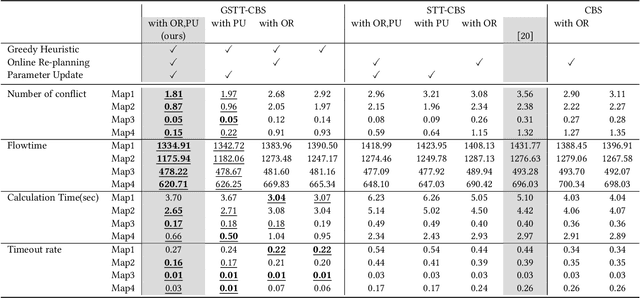

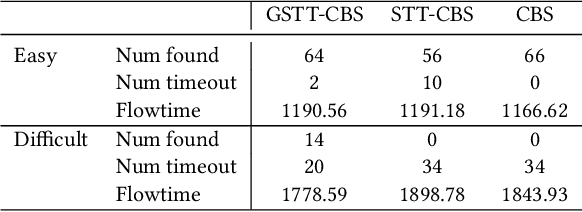
This study explores the problem of Multi-Agent Path Finding with continuous and stochastic travel times whose probability distribution is unknown. Our purpose is to manage a group of automated robots that provide package delivery services in a building where pedestrians and a wide variety of robots coexist, such as delivery services in office buildings, hospitals, and apartments. It is often the case with these real-world applications that the time required for the robots to traverse a corridor takes a continuous value and is randomly distributed, and the prior knowledge of the probability distribution of the travel time is limited. Multi-Agent Path Finding has been widely studied and applied to robot management systems; however, automating the robot operation in such environments remains difficult. We propose 1) online re-planning to update the action plan of robots while it is executed, and 2) parameter update to estimate the probability distribution of travel time using Bayesian inference as the delay is observed. We use a greedy heuristic to obtain solutions in a limited computation time. Through simulations, we empirically compare the performance of our method to those of existing methods in terms of the conflict probability and the actual travel time of robots. The simulation results indicate that the proposed method can find travel paths with at least 50% fewer conflicts and a shorter actual total travel time than existing methods. The proposed method requires a small number of trials to achieve the performance because the parameter update is prioritized on the important edges for path planning, thereby satisfying the requirements of quick implementation of robust planning of automated delivery services.