 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous robotic re-alignment for face-to-face underwater human-robot interaction
Jan 09, 2024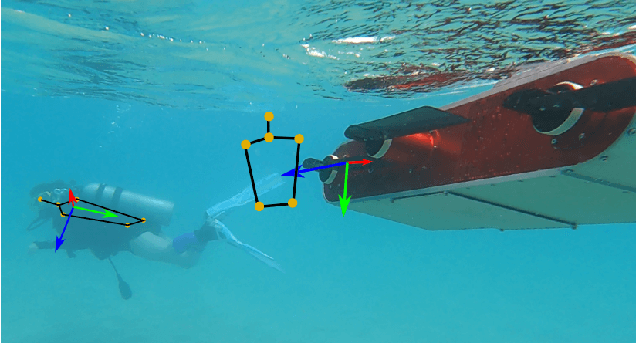
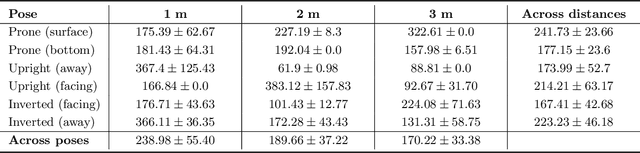
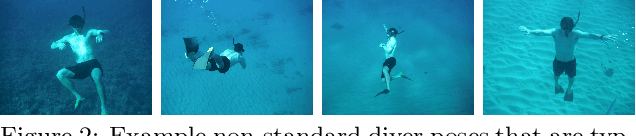
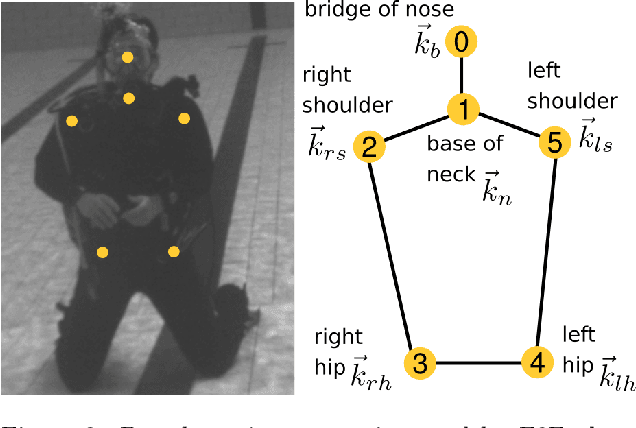
The use of autonomous underwater vehicles (AUVs) to accomplish traditionally challenging and dangerous tasks has proliferated thanks to advances in sensing, navigation, manipulation, and on-board computing technologies. Utilizing AUVs in underwater human-robot interaction (UHRI) has witnessed comparatively smaller levels of growth due to limitations in bi-directional communication and significant technical hurdles to bridge the gap between analogies with terrestrial interaction strategies and those that are possible in the underwater domain. A necessary component to support UHRI is establishing a system for safe robotic-diver approach to establish face-to-face communication that considers non-standard human body pose. In this work, we introduce a stereo vision system for enhancing UHRI that utilizes three-dimensional reconstruction from stereo image pairs and machine learning for localizing human joint estimates. We then establish a convention for a coordinate system that encodes the direction the human is facing with respect to the camera coordinate frame. This allows automatic setpoint computation that preserves human body scale and can be used as input to an image-based visual servo control scheme. We show that our setpoint computations tend to agree both quantitatively and qualitatively with experimental setpoint baselines. The methodology introduced shows promise for enhancing UHRI by improving robotic perception of human orientation underwater.