 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlgorithms For Shaping a Particle Swarm With a Shared Control Input Using Boundary Interaction
Sep 07, 2016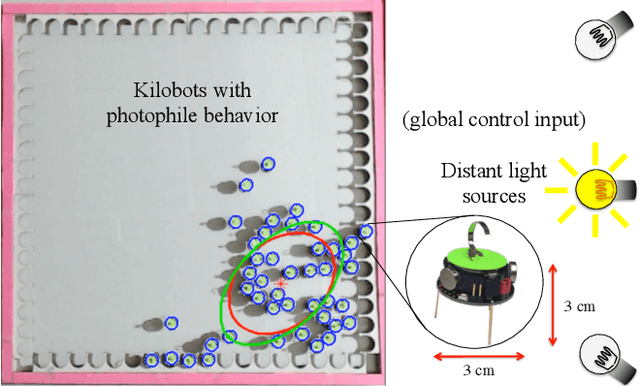
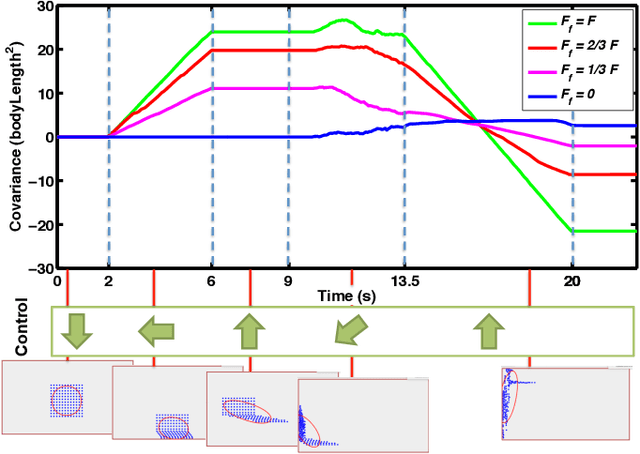
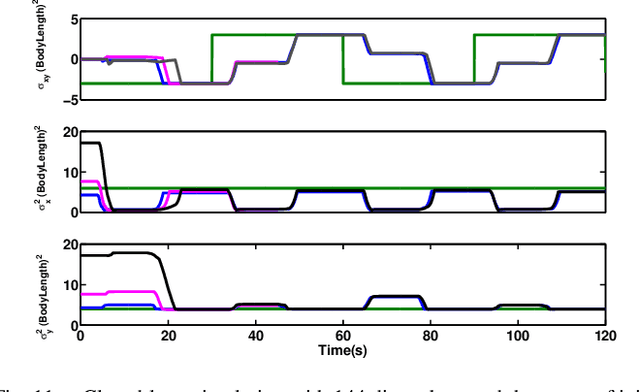
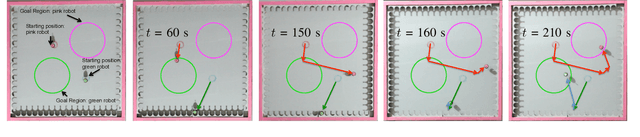
Consider a swarm of particles controlled by global inputs. This paper presents algorithms for shaping such swarms in 2D using boundary walls. The range of configurations created by conforming a swarm to a boundary wall is limited. We describe the set of stable configurations of a swarm in two canonical workspaces, a circle and a square. To increase the diversity of configurations, we add boundary interaction to our model. We provide algorithms using friction with walls to place two robots at arbitrary locations in a rectangular workspace. Next, we extend this algorithm to place $n$ agents at desired locations. We conclude with efficient techniques to control the covariance of a swarm not possible without wall-friction. Simulations and hardware implementations with 100 robots validate these results. These methods may have particular relevance for current micro- and nano-robots controlled by global inputs.