 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrowable and Interpretable Neural Control with Online Continual Learning for Autonomous Lifelong Locomotion Learning Machines
May 17, 2025Continual locomotion learning faces four challenges: incomprehensibility, sample inefficiency, lack of knowledge exploitation, and catastrophic forgetting. Thus, this work introduces Growable Online Locomotion Learning Under Multicondition (GOLLUM), which exploits the interpretability feature to address the aforementioned challenges. GOLLUM has two dimensions of interpretability: layer-wise interpretability for neural control function encoding and column-wise interpretability for robot skill encoding. With this interpretable control structure, GOLLUM utilizes neurogenesis to unsupervisely increment columns (ring-like networks); each column is trained separately to encode and maintain a specific primary robot skill. GOLLUM also transfers the parameters to new skills and supplements the learned combination of acquired skills through another neural mapping layer added (layer-wise) with online supplementary learning. On a physical hexapod robot, GOLLUM successfully acquired multiple locomotion skills (e.g., walking, slope climbing, and bouncing) autonomously and continuously within an hour using a simple reward function. Furthermore, it demonstrated the capability of combining previous learned skills to facilitate the learning process of new skills while preventing catastrophic forgetting. Compared to state-of-the-art locomotion learning approaches, GOLLUM is the only approach that addresses the four challenges above mentioned without human intervention. It also emphasizes the potential exploitation of interpretability to achieve autonomous lifelong learning machines.
An Interpretable Neural Control Network with Adaptable Online Learning for Sample Efficient Robot Locomotion Learning
Jan 18, 2025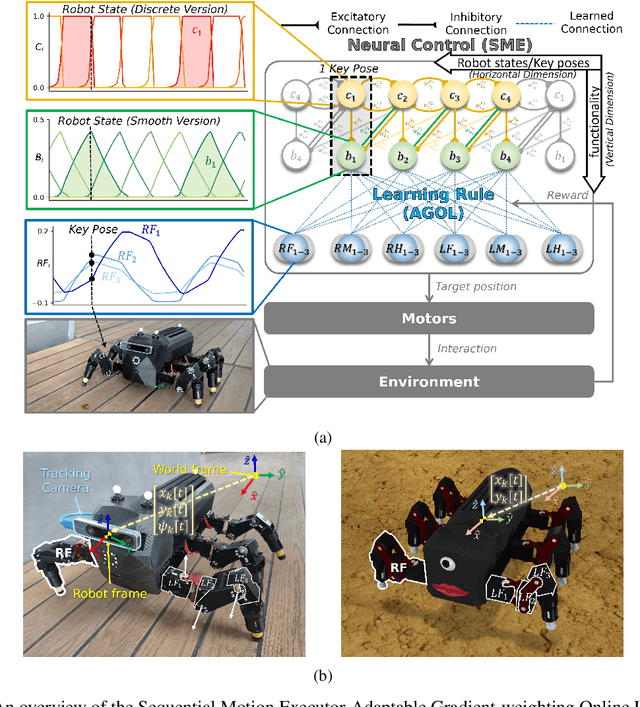
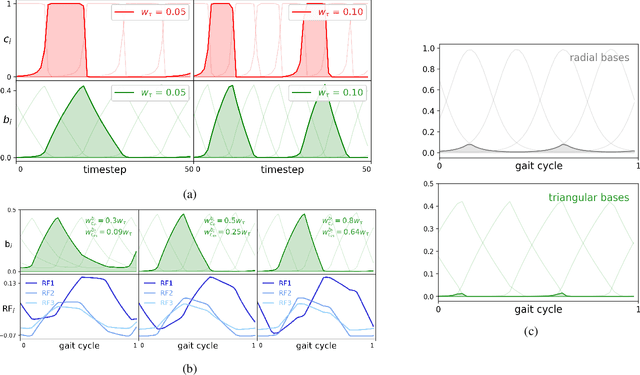
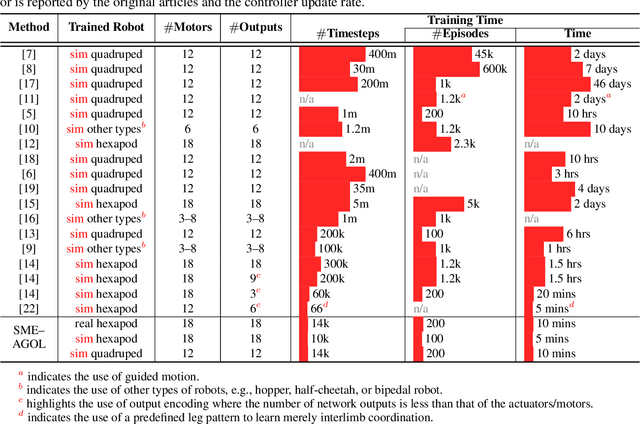
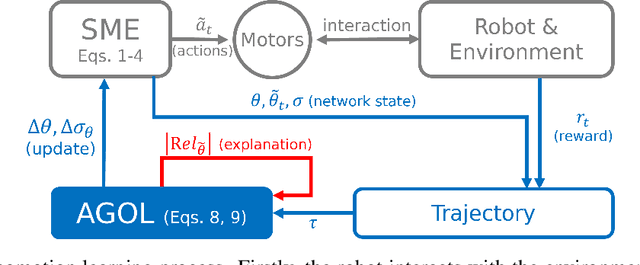
Robot locomotion learning using reinforcement learning suffers from training sample inefficiency and exhibits the non-understandable/black-box nature. Thus, this work presents a novel SME-AGOL to address such problems. Firstly, Sequential Motion Executor (SME) is a three-layer interpretable neural network, where the first produces the sequentially propagating hidden states, the second constructs the corresponding triangular bases with minor non-neighbor interference, and the third maps the bases to the motor commands. Secondly, the Adaptable Gradient-weighting Online Learning (AGOL) algorithm prioritizes the update of the parameters with high relevance score, allowing the learning to focus more on the highly relevant ones. Thus, these two components lead to an analyzable framework, where each sequential hidden state/basis represents the learned key poses/robot configuration. Compared to state-of-the-art methods, the SME-AGOL requires 40% fewer samples and receives 150% higher final reward/locomotion performance on a simulated hexapod robot, while taking merely 10 minutes of learning time from scratch on a physical hexapod robot. Taken together, this work not only proposes the SME-AGOL for sample efficient and understandable locomotion learning but also emphasizes the potential exploitation of interpretability for improving sample efficiency and learning performance.