 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-sensor large-scale dataset for multi-view 3D reconstruction
Mar 11, 2022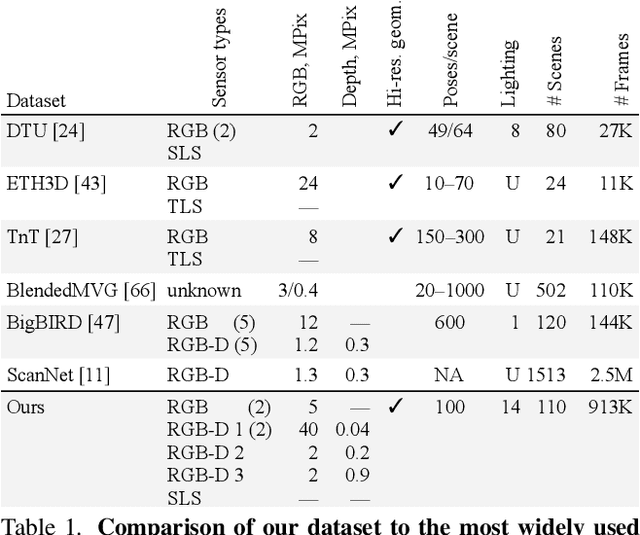
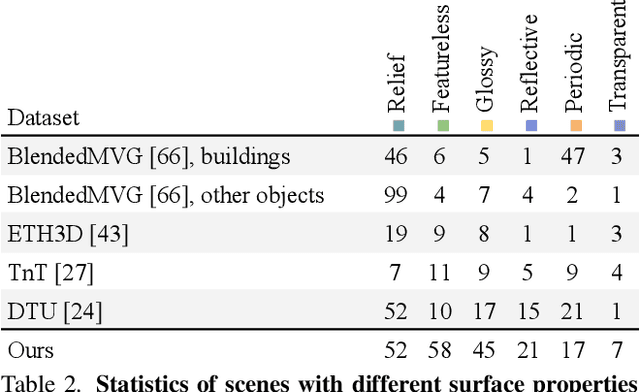
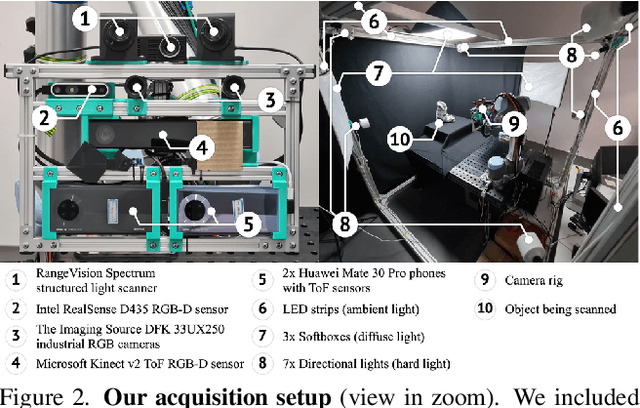
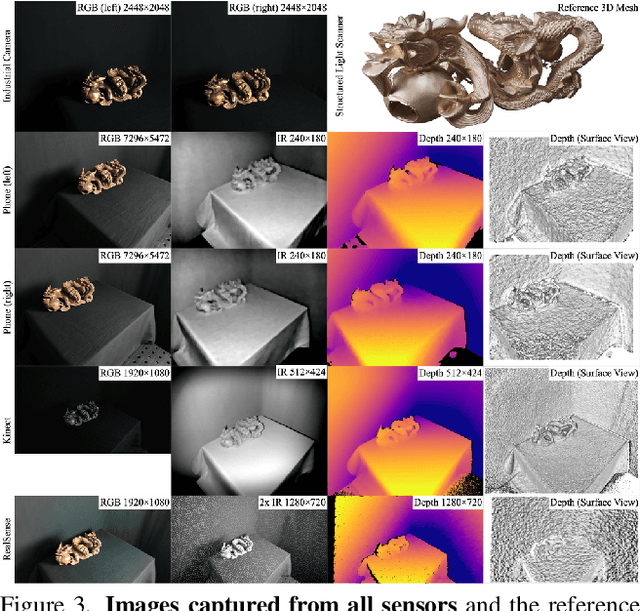
We present a new multi-sensor dataset for 3D surface reconstruction. It includes registered RGB and depth data from sensors of different resolutions and modalities: smartphones, Intel RealSense, Microsoft Kinect, industrial cameras, and structured-light scanner. The data for each scene is obtained under a large number of lighting conditions, and the scenes are selected to emphasize a diverse set of material properties challenging for existing algorithms. In the acquisition process, we aimed to maximize high-resolution depth data quality for challenging cases, to provide reliable ground truth for learning algorithms. Overall, we provide over 1.4 million images of 110 different scenes acquired at 14 lighting conditions from 100 viewing directions. We expect our dataset will be useful for evaluation and training of 3D reconstruction algorithms of different types and for other related tasks. Our dataset and accompanying software will be available online.