 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Data Generation and Vision-based Wrinkle and Keypoint Detection for Bimanual Cloth Manipulation
Jun 04, 2026Robotic manipulation of textiles remains challenging because continuous deformation and self-occlusions hinder the robust visual perception required to estimate the cloth's state. To address the lack of annotated real-world data, we developed a Blender-based synthetic pipeline exporting auto-annotated keypoints, and combined manually labeled renders with real-world data to train a wrinkle detector. We present a perception framework integrating a CNN for permutation-invariant keypoint detection and a YOLOv8-OpenCV pipeline to extract grasping points from structural wrinkles. A proposed bimanual algorithm uses this system to stretch fully folded garments via wrinkles, transitioning to keypoint-based ironing once corners emerge. The keypoint model achieves a Mean Position Error (MPE) of 1.7615 pixels. The perception system transfers to physical fabrics without fine-tuning, outperforming baselines that fail in high-occlusion states or yield false positives on severe folds.
Hierarchical Sampling based Particle Filter for Visual-inertial Gimbal in the Wild
Jun 22, 2022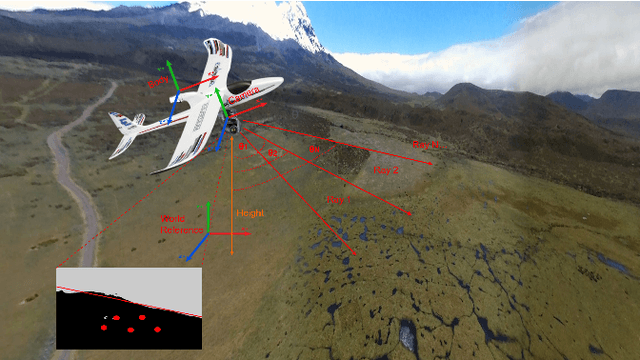
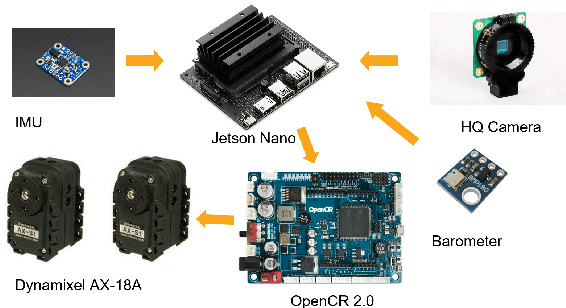
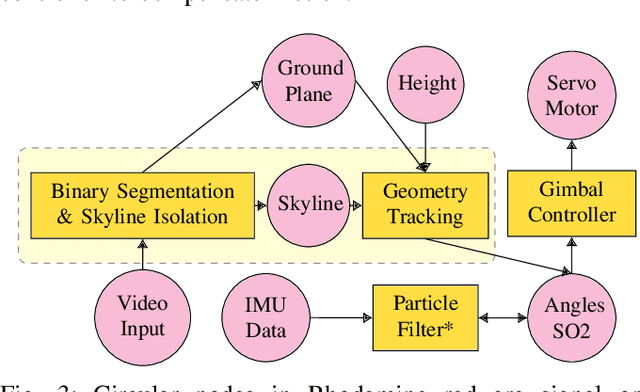
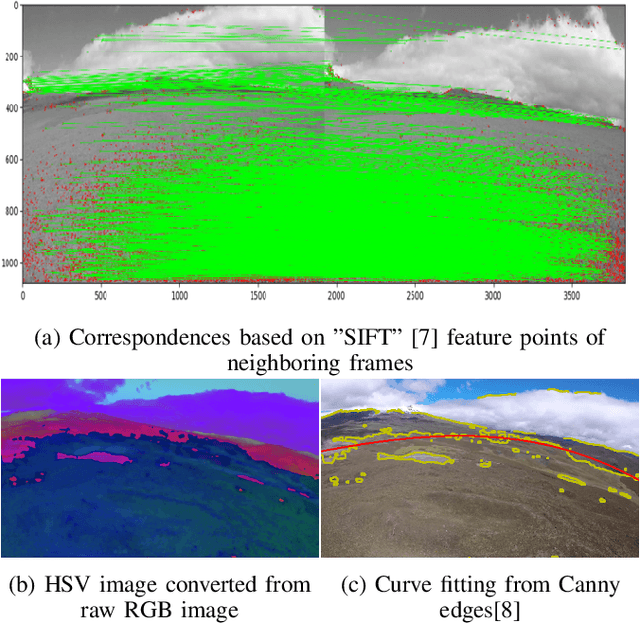
The gimbal platform has been widely used in photogrammetry and robot perceptual module to stabilize the camera pose, thereby improving the captured video quality. Usually a gimbal is mainly composed of sensors and actuator parts. The orientation measurements from sensor can be inputted directly to actuator to steer camera towards proper pose. But the off-the-shelf custom product is either quite expensive, or depending on highly precise IMU and Brushless DC motor with hall sensor to estimate angles, which is prone to suffer from accumulative drift over long-term operation. In this paper, a CV based new tracking and fusion algorithm dedicated for gimbal system on drones operating in nature is proposed, main contributions are listed as below: a) a light-weight Resnet -18 backbone based network model was trained from scratch, and deployed onto Jetson Nano platform to segment the image into binary parts (ground and sky). b) geometric primitives tracking of the skyline and ground plane in 3D as cues, along with orientation estimation from IMU can provide multiple guesses for orientation. c) spherical surface based adaptive particle sampling can fuse orientation from aforementioned sensor sources efficiently. The final prototyping algorithm is tested on the real-time embedded system, and with both simulation on ground and real functional tests in the air.