 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeatureLego: Volume Exploration Using Exhaustive Clustering of Super-Voxels
Oct 11, 2018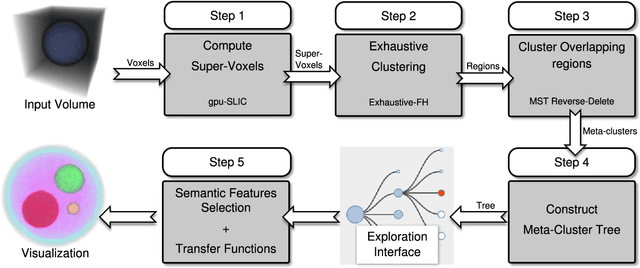
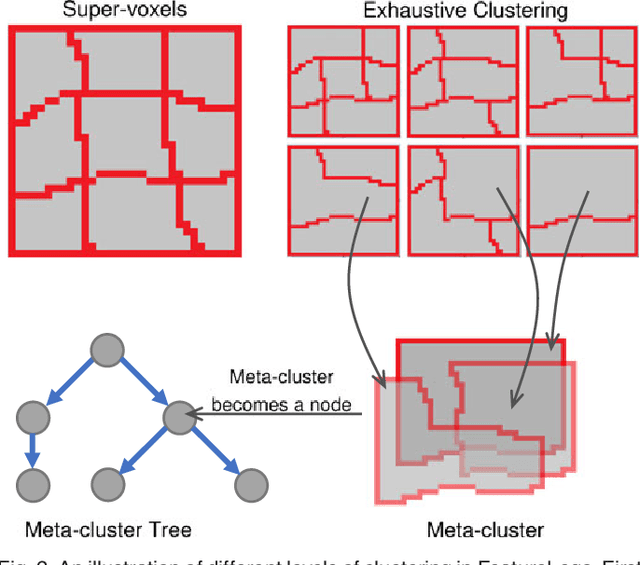
We present a volume exploration framework, FeatureLego, that uses a novel voxel clustering approach for efficient selection of semantic features. We partition the input volume into a set of compact super-voxels that represent the finest selection granularity. We then perform an exhaustive clustering of these super-voxels using a graph-based clustering method. Unlike the prevalent brute-force parameter sampling approaches, we propose an efficient algorithm to perform this exhaustive clustering. By computing an exhaustive set of clusters, we aim to capture as many boundaries as possible and ensure that the user has sufficient options for efficiently selecting semantically relevant features. Furthermore, we merge all the computed clusters into a single tree of meta-clusters that can be used for hierarchical exploration. We implement an intuitive user-interface to interactively explore volumes using our clustering approach. Finally, we show the effectiveness of our framework on multiple real-world datasets of different modalities.