 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Telekinesis: Learning a Robotic Hand Imitator by Watching Humans on Youtube
Feb 21, 2022


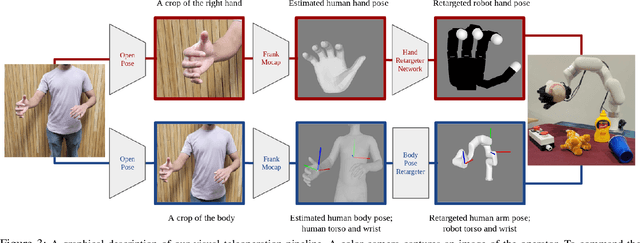
We build a system that enables any human to control a robot hand and arm, simply by demonstrating motions with their own hand. The robot observes the human operator via a single RGB camera and imitates their actions in real-time. Human hands and robot hands differ in shape, size, and joint structure, and performing this translation from a single uncalibrated camera is a highly underconstrained problem. Moreover, the retargeted trajectories must effectively execute tasks on a physical robot, which requires them to be temporally smooth and free of self-collisions. Our key insight is that while paired human-robot correspondence data is expensive to collect, the internet contains a massive corpus of rich and diverse human hand videos. We leverage this data to train a system that understands human hands and retargets a human video stream into a robot hand-arm trajectory that is smooth, swift, safe, and semantically similar to the guiding demonstration. We demonstrate that it enables previously untrained people to teleoperate a robot on various dexterous manipulation tasks. Our low-cost, glove-free, marker-free remote teleoperation system makes robot teaching more accessible and we hope that it can aid robots that learn to act autonomously in the real world. Videos at https://robotic-telekinesis.github.io/